死角滤波
该工具用于识别并去除死角造成的错误数据,避免影响后续处理。
目标物体表面的部分区域反射的激光线会被遮挡,这些区域即为死角。如目标物体表面有紧密排列的凹陷和凸起,激光线可能发生多重反射。多重反射会导致死角附近出现错误数据。
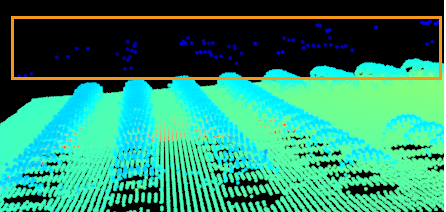
如下图所示,橙色框中的蓝色点即为错误数据。
| 目标物体 | 点云 |
|---|---|
|
|
|
死角滤波工具需根据触发频率计算扫描数据的Y轴分辨率。 |
请执行以下步骤进行死角滤波:
-
单击数据采集区的
 按钮,采集一次数据。
按钮,采集一次数据。 -
单击死角滤波右侧的编辑按钮,打开死角滤波工具。
-
在移动方向下,选择目标物体相对轮廓测量仪的移动方向。
-
查看或计算Y轴分辨率。
-
由编码器触发扫描时,请查看并确认Y轴分辨率。
-
按固定频率触发扫描时,请在移动速度文本框中输入目标物体相对轮廓测量仪的移动速度。Y轴分辨率文本框中将会显示计算出的Y轴分辨率。
-
-
设置滤波强度。滤波强度越高,去除的错误数据越多,但处理速度越慢。
-
单击滤波按钮,查看死角滤波效果。
-
如滤波效果符合要求,单击应用按钮,应用设置并退出死角滤波工具。
单击应用按钮后,启用死角滤波开关将自动开启。下一次采集数据时,将按照工具中的设置进行死角滤波。
如不需进行死角滤波,请关闭该开关,然后重新采集数据。
-
如滤波效果不符合要求,请根据行扫描触发源的设置值进行处理:
行扫描触发源 处理方式 编码器
-
重复步骤5和6。
固定频率
-
重复步骤5和6。
-
在Y轴分辨率下,将计算方式改为自定义,并微调默认值。
如滤波效果仍不符合要求,请联系技术支持。
-
-
-
重新采集数据,获取死角滤波后的深度图和点云。