轮廓测量仪工作原理
轮廓测量仪通过内部的激光发射器和感光单元完成对目标物体的扫描。本章介绍扫描的基本过程及相关概念。
扫描的基本过程
-
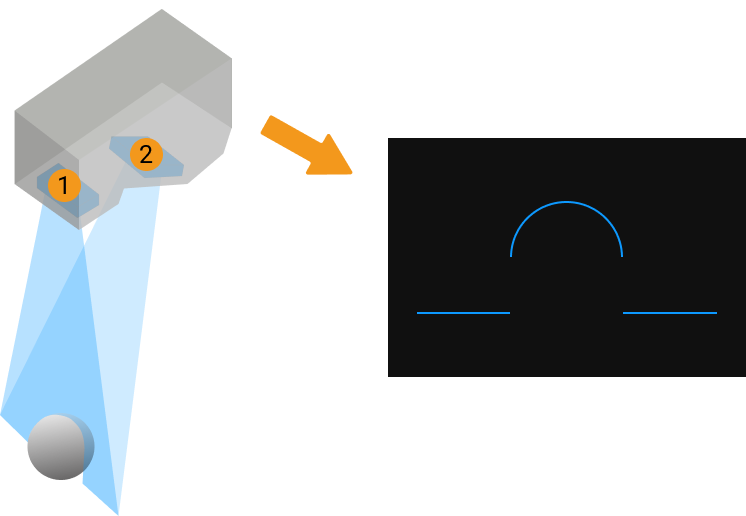
激光发射器(上图中1)发射一条线形的激光,照射到位于轮廓测量仪视野中的目标物体上。
-
激光被目标物体反射后,被感光单元(上图中2)接收。因为感光单元和激光发射器之间有夹角,目标物体上不同高度的表面反射的激光落在感光单元的不同位置上。此时感光单元上生成的图像为Mech-Eye Viewer中的原始图像。
-
激光发射器、感光单元和目标物体形成一个三角形。基于三角测量原理,轮廓测量仪即可根据已知的角度和距离信息,计算出反射的激光线上各点到感测头的距离。
-
轮廓测量仪根据计算结果和其他参数设置,从原始图像中提取出一条轮廓线。轮廓线反映目标物体的一个截面到感测头距离的变化,也即高度的变化。
-
目标物体和轮廓测量仪发生相对移动。轮廓测量仪重复上述步骤,进行多次扫描,即可获得目标物体的一系列轮廓线,用以生成强度图、深度图和点云。
相关概念
-
行扫描:轮廓测量仪发射一次激光并生成一条轮廓线的过程。
-
一轮数据采集:轮廓测量仪完成多次行扫描,生成多条轮廓线,并拼接轮廓线生成强度图、深度图和点云的过程。
-
触发:让轮廓测量仪开始进行一轮数据采集或一次行扫描。
一轮数据采集和一次行扫描分别有两种触发方式,适用不同的适用场景。详见触发数据采集的方式。