이동 컨트롤
진입/조정/배치 단계에서 관절 운동을 강제로 사용하기
기본적으로 선택되어 있지 않으며 관절 운동을 강제로 사용하지 않습니다.
현장 작업 공간이 제한되어 직선 운동으로 팔레타이징을 수행해야 하는 경우 이 파라미터를 선택하십시오. 제한된 작업 공간으로 인해 싱귤래리티 문제가 발생할 수 있습니다. 이 경우 모든 단계(진입, 조정, 배치)의 로봇 운동을 관절 운동으로 설정할 수 있습니다.
가속도&속도 스케일 비율
| 값 범위 |
0~100%. 기본값: 100%. |
| 응용 시나리오 |
이 파라미터는 파렛트에 접근할 때와 실제로 상자를 배치할 때 로봇의 속도가 다를 때 사용될 수 있습니다. |
| 설명 |
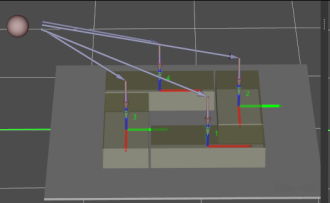
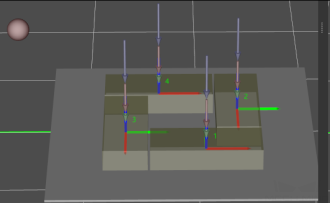
실제로 상자를 배치할 때의 가속도&속도. *가속도&속도 × 가속도&속도 스케일 비율*을 통해 계산됩니다. 로봇이 파렛트 영역에 들어가는 과정은 3가지 단계로 나눌 수 있습니다. 단계1: 보라색 화살표로 표시 - 접근 단계. 로봇이 파렛트(보라색 화살표로 표시) 영역에 접근할 때의 가속도와 속도는 “기본 이동 설정” 패널에서 설정하며, 마지막 두 단계의 가속도와 속도는 *가속도&속도 × 가속도&속도 스케일 비율*을 통해 계산된 값입니다. 
|
진입 및 조정
세 가지 파라미터가 함께 로봇이 파렛트 영역에 들어가는 경로를 결정합니다. 상자가 지정된 각도로 이미 배치된 상자에 접근하도록 진입 경로를 조정하면 상자가 수직으로 배치됩니다. 상자를 수직 경로로 직접 적재할 경우 정확도 및 기타 요인으로 인해 로봇, 상자 및 이미 배치된 상자들 사이에 충돌이 발생할 수 있습니다.
이 파라미터 그룹은 그림에서 빨간색 점으로 표시된 것처럼 상자가 파렛트에 배치될 때 이동될 세 가지 위치(entry, adjust 및 place)를 결정합니다. 아래 그림은 상자가 배치될 위치(정면도)를 보여줍니다.
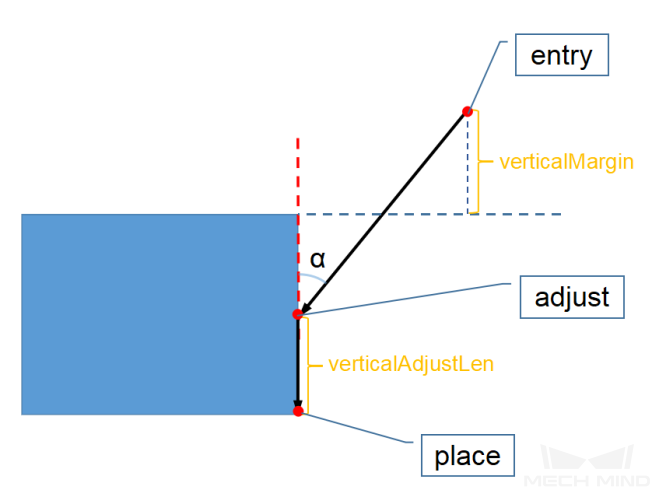
수직 방향에서 길이 비율을 조정하기
| 설명 |
이 파라미터는 위 그림의 "조정"(adjust) 지점의 위치에 영향을 미칩니다. 파라미터 값 = verticalAdjustLen /상자의 높이 |
| 값 범위 |
0~1 |
| 추천값 |
0.5 |