포인트 클라우드 및 포즈를 표시하기
기능 설명
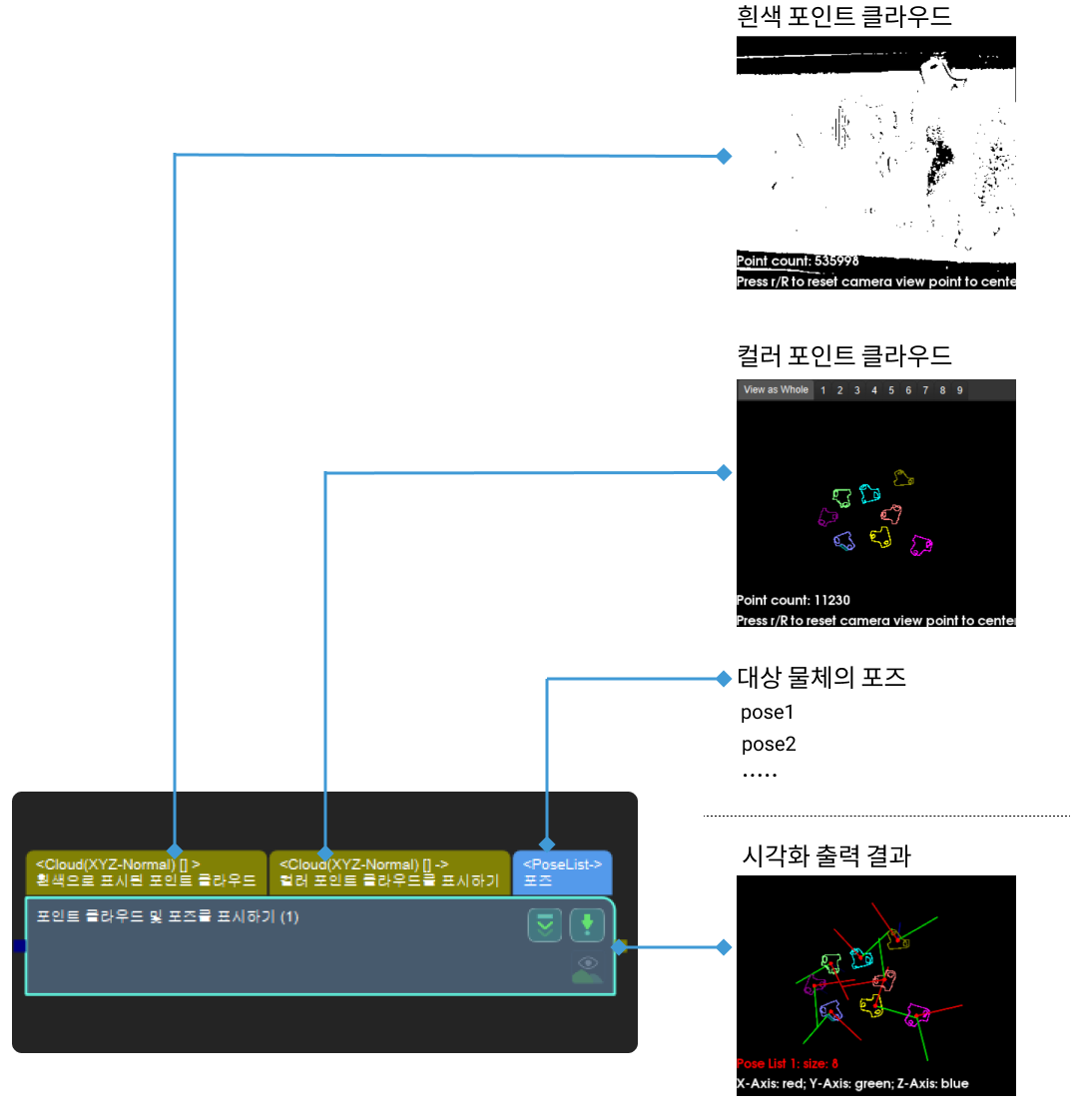
이 스텝에서는 포인트 클라우드와 포즈를 시각화할 수 있습니다.
|
비슷한 스텝 비교: 포인트 클라우드 및 포즈를 표시하기 스텝은 포인트 클라우드 및 포즈를 표시하는 데 사용됩니다. 이미지를 표시하기 스텝은 컬러 맵 혹은 마스크 이미지를 표시하는 데 사용됩니다. |
응용 시나리오
이 스텝은 포즈와 포인트 클라우드의 상대적 위치를 표시하는 데 사용됩니다. 예를 들어 물체 피킹 시나리오에서 포즈가 맞는지를 체크하고 보통 디버깅 단계에 사용됩니다.
파라미터 설명
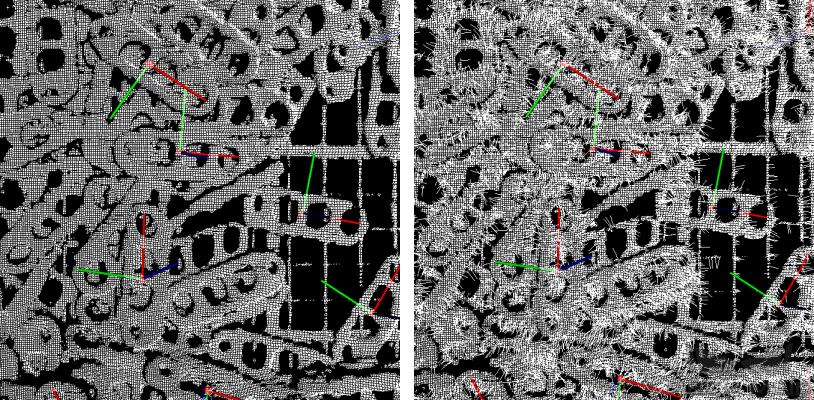
법선 벡터 시각화 설정
- 법선 벡터 표시하기
-
파라미터 설명 :이 파라미터는 포인트 클라우드의 법선 벡터가 시각화 출력 결과에 표시되는지 여부를 결정합니다.
기본 값: 선택하지 않음.
조정 설명: 이 항목을 선택한 후 포인트 클라우드 법선 벡터가 시각화 출력 결과에 표시됩니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
- 법선 벡터 표시 간격
-
파라미터 설명: 이 파라미터의 값은 법선 벡터의 밀도를 결정합니다(이 항목은 법선 벡터 표시하기를 선택한 후 표시됩니다).
기본값: 20
조정 설명 :이 파라미터는 법선 벡터 사이의 거리를 설정하는 데 사용되며 단위는 mm입니다. 이 값이 클수록 법선 벡터를 드물게 표시합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
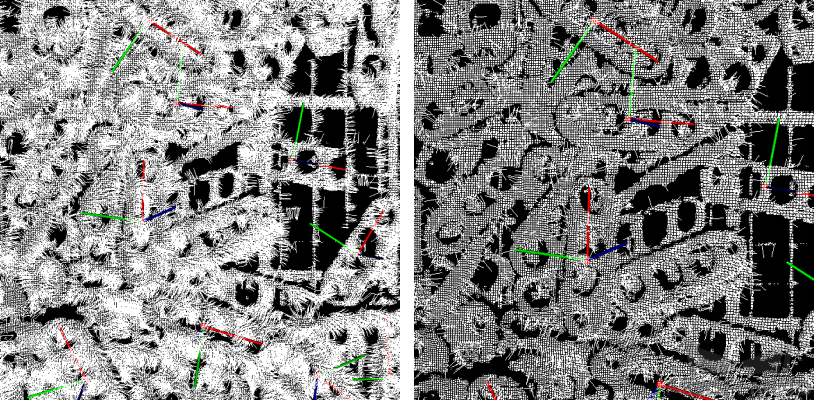
Z값 시각화 설정
- 시각화 포인트 클라우드 Z값
-
파라미터 설명 :이 파라미터는 그레이스케일이 다른 포인트 클라우드를 표시하는 데 사용됩니다.
기본 값: 선택하지 않음.
조정 설명: 이 옵션을 선택하면 Z값에 따라 다양한 그레이스케일로 포인트 클라우드를 표시할 것입니다.
- 상한
-
파라미터 설명 : 색칠이 필요한 Z 방향 최대값 (Z 값 시각화 설정이 선택된 경우에만 유효합니다).
기본값: 0
조정 설명: 이 값은 색칠이 필요한 Z 방향 최대 값을 나타냅니다. 이 값이 클수록 이미지가 점점 어두운 회색으로 변하며 덜 뚜렷해집니다.
- 하한
-
파라미터 설명 : 색칠이 필요한 Z 방향 최소값 (Z 값 시각화 설정이 선택된 경우에만 유효합니다).
기본값: 0
조정 설명: 이 값은 색칠이 필요한 Z 방향 최소 값을 나타냅니다. 이 값이 작을수록 이미지가 더 뚜렷해집니다.