캘리브레이션 보드 포즈 계산 및 카메라 내부 파라미터 검사
기능 설명
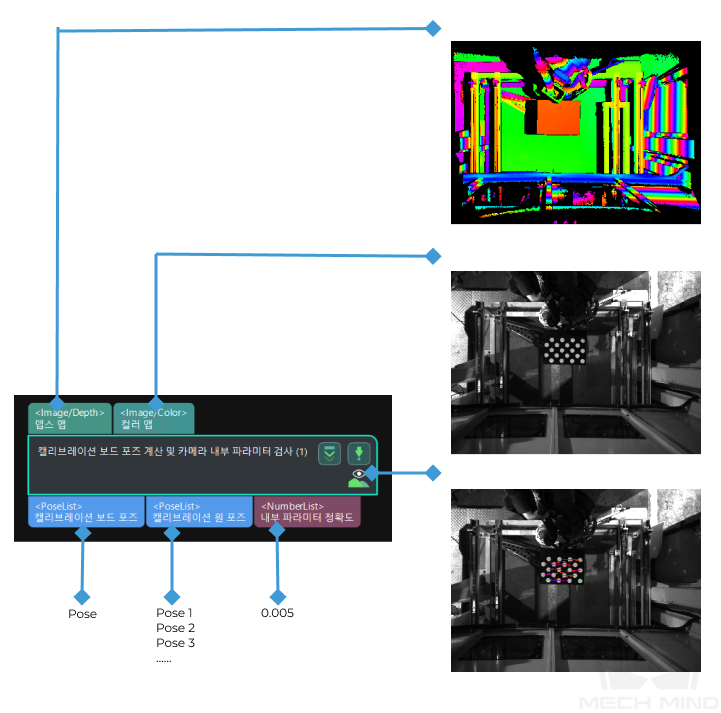
이 스텝은 입력된 컬러 맵을 기반으로 캘리브레이션 원의 원심을 감지하고 카메라 내부 파라미터 및 입력된 뎁스 맵을 결합하여 캘리브레이션 보드의 포즈 및 캘리브레이션 원의 포즈를 생성할 수 있습니다. 또는 이 스텝은 캘리브레이션 원의 포즈에 따라 카메라 내부 파라미터 정확도를 평가할 수 있습니다.
|
캘리브레이션 원의 포즈는 캘리브레이션 보드에 있는 캘리브레이션 원 십자 중심의 포즈를 가리킵니다. |
파라미터 설명
- 캘리브레이션 보드 모델
-
파라미터 설명: 이 파라미터는 캘리브레이션 보드 모델을 설정하는 데 사용됩니다.
조절 설명: 실제 사용하는 캘리브레이션 보드 모델에 따라 이 파라미터를 설정하십시오.
- 컬러 맵 ROI 파일
-
파라미터 설명: 이 파라미터는 2D ROI를 설정하는 데 사용됩니다.
조절 설명: 편집기 열기를 단번 클릭하여 2D ROI를 설정합니다.
- 핸드-아이 시스템을 사용하여 보상하기
-
설명: 캘리브레이션 과정에서 핸드-아이 시스템(로봇과 카메라)에 정확도 문제가 있는 경우 보상 파라미터 계산을 통해 핸드-아이 시스템의 정확도를 높일 수 있습니다. 이 옵션을 선택하면 캘리브레이션 보드의 포즈, 캘리브레이션 원의 포즈 또는 카메라 내부 파라미터 정확도를 계산할 때 오류를 줄이기 위해 보상 파라미터가 사용됩니다.
기본값: 선택함.