포즈 변환
응용 시나리오
이 스텝은 보통 포즈가 카메라 기준 좌표계 및 로봇 기준 좌표계 간의 상호 전환에 사용됩니다.
프로젝트에서 트러스 로봇을 사용하는 경우 포즈 변환(트러스) 스텝을 사용하도록 선택해야 합니다.
파라미터 설명
시각화 설정
- 선택한 좌표계에서 포인트 클라우드를 표시하기
-
파라미터 설명: 로봇 또는 카메라 좌표계에서 포인트 클라우드를 표시합니다.
기본값: 로봇 좌표계
값 리스트: 로봇 좌표계, 카메라 좌표계
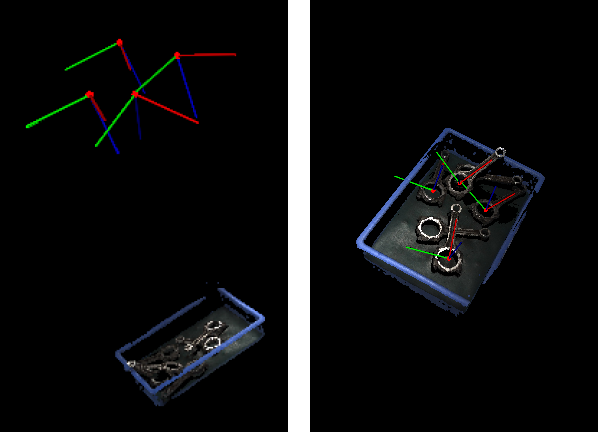
설명: 카메라 좌표계를 선택할 때 디버그 출력 창에서 카메라 좌표계에서의 시각화 출력 결과를 표시합니다. 로봇 좌표계를 선택할 때 디버그 출력 창에서 로봇 좌표계에서의 시각화 출력 결과를 표시합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
프로젝트에 시나리오 포인트 클라우드를 설정한 경우에만 이 파라미터를 설정할 수 있습니다.
-
로봇 좌표계를 선택하는 경우 디버그 출력 창은 검은색이고 시각을 조정해야 포인트 클라우드 및 좌표를 볼 수 있습니다.
-
카메라 좌표계를 선택하는 경우 디버그 출력 창에는 포인트 클라우드만 표시하고 포인트 클라우드 방향을 조정해야 좌표를 볼 수 있습니다.
-
- 포즈 시각화 설정
-
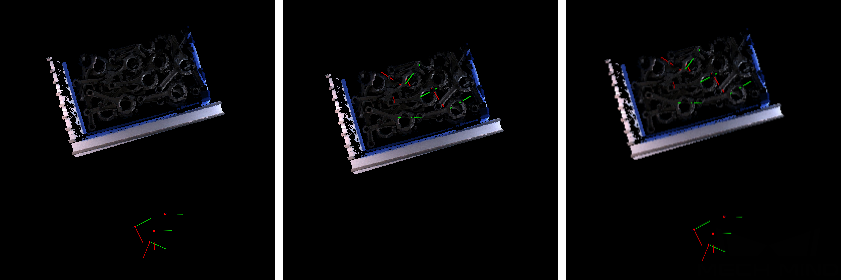
파라미터 설명: 이 파라미터는 포즈의 시각화 형식을 설정하는 데 사용됩니다.
기본값: 출력한 포즈만 표시하기
값 리스트: 출력한 포즈만 표시하기, 입력한 포즈만 표시하기, 출력한 포즈와 입력한 포즈를 모두 표시하기
조정 설명: 실제 필요에 따라 드롭다운 목록에서 적절한 포즈 표시 설정을 선택합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
변환 설정
- 변환 유형
-
파라미터 설명: 이 파라미터는 포즈의 변환 유형을 설정하는 데 사용됩니다.
기본값: CameraToRobot
값 리스트: CameraToRobot, RobotToCamera, AllWithFirst, FirstWithAll, UseCorrespondenceInput
조정 설명:
-
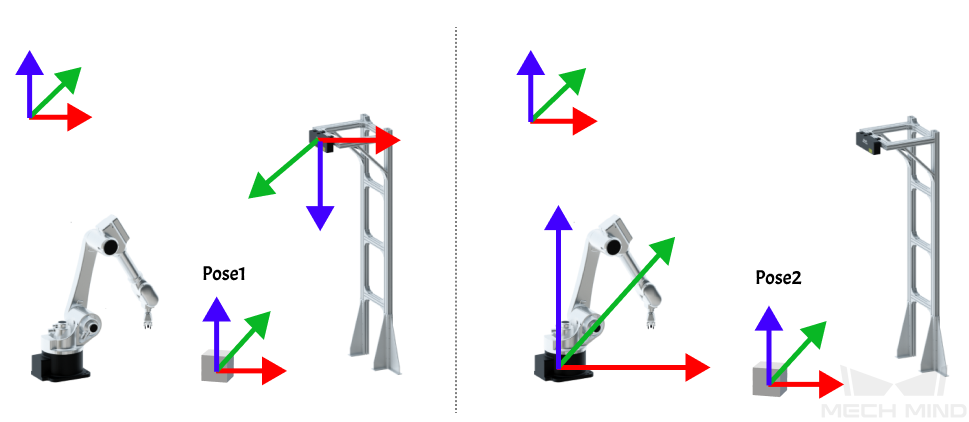
CameraToRobot:카메라 좌표계에서의 물체의 포즈 Pose1이 알려진 경우 변환 유형을 CameraToRobot으로 설정하면 로봇 좌표계에서의 물체의 포즈 Pose2를 출력할 수 있습니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
-
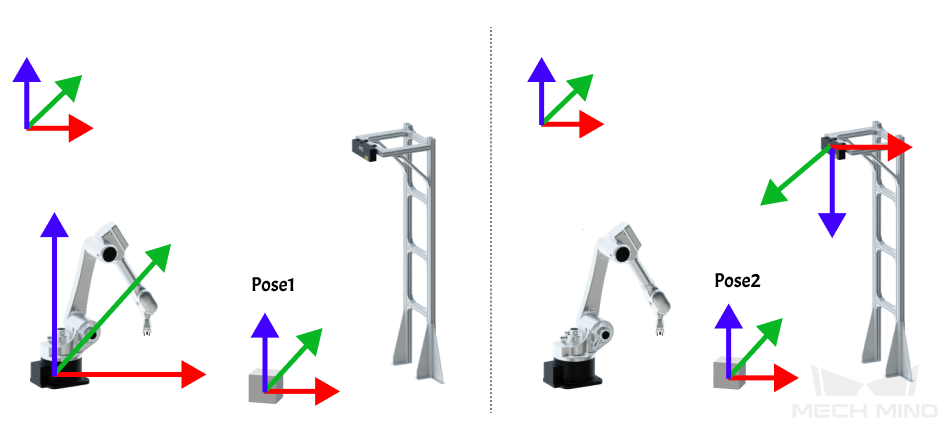
RobotToCamera:로봇 좌표계에서의 물체의 포즈 Pose1이 알려진 경우 변환 유형을 RobotToCamera로 선택하면 카메라 좌표계에서의 물체의 포즈 Pose2를 출력할 수 있습니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
-
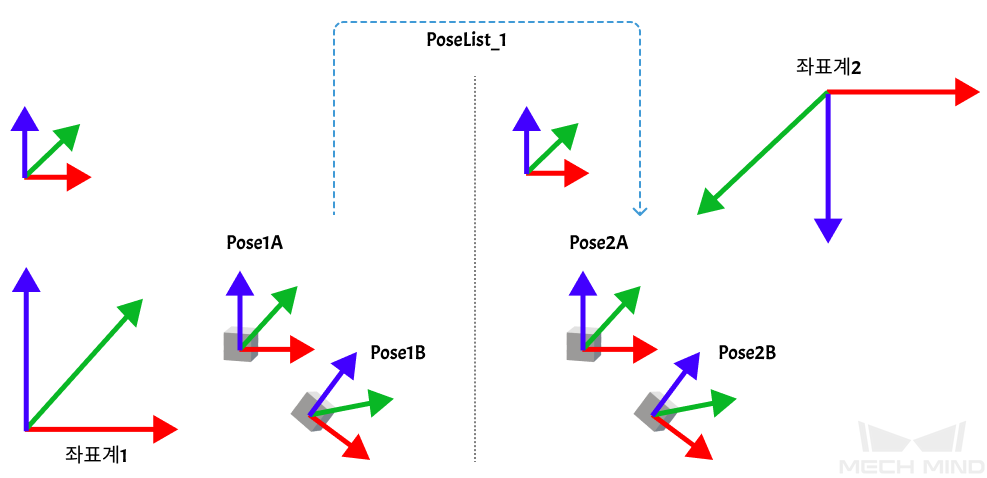
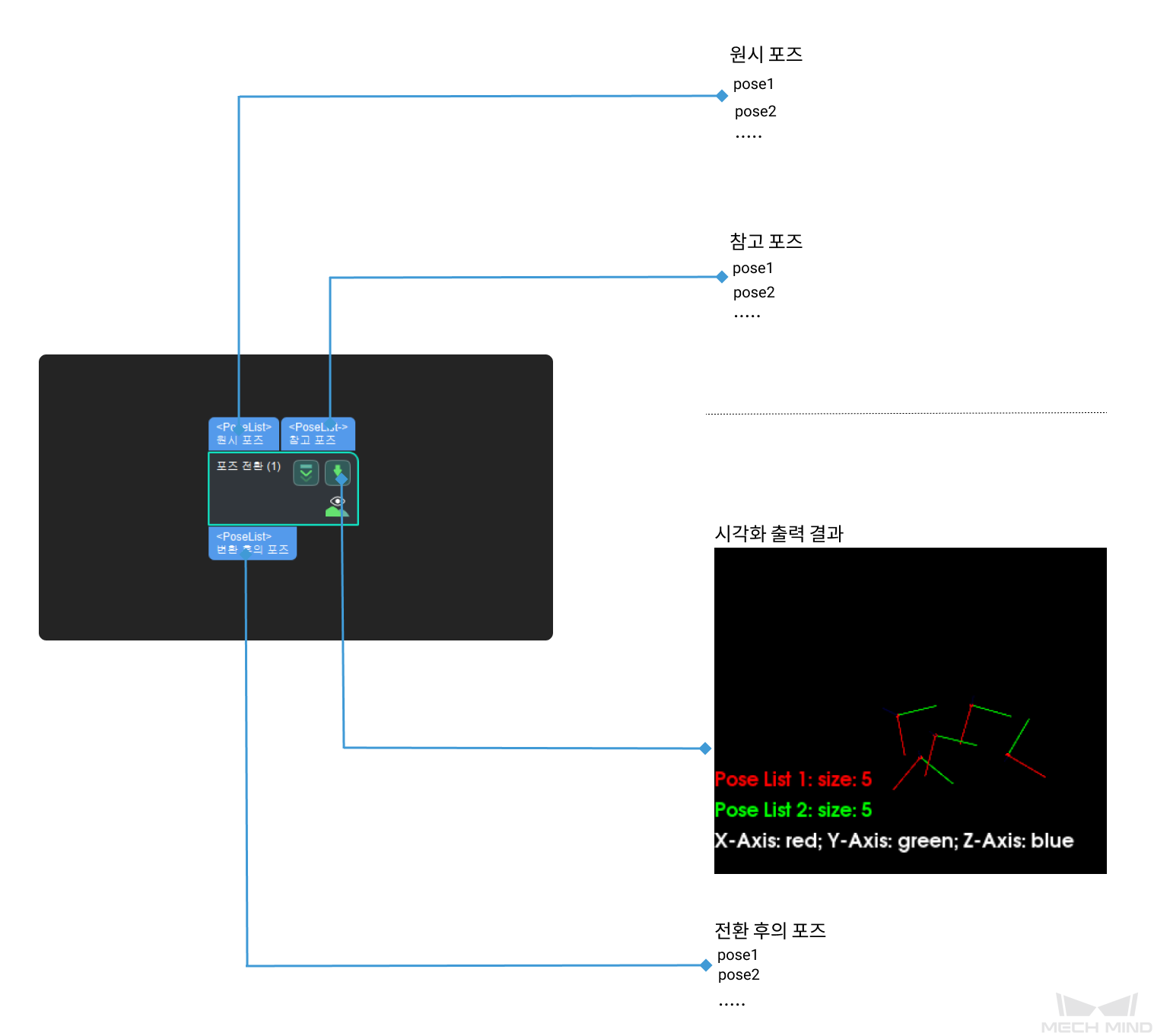
AllWithFirst:좌표계 1에서의 물체 A, B의 포즈 Pose1A, Pose1B가 알려진 경우 변환 유형을 AllWithFirst로 선택할 때(기준 포즈를 입력해야 함) 좌표계 2에서의 물체 A, B의 포즈 Pose2A, Pose2B를 출력할 수 있습니다. 변환하는 동안 첫 번째 기준 포즈를 사용하여 변환할 모든 포즈를 변환해야 합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
-
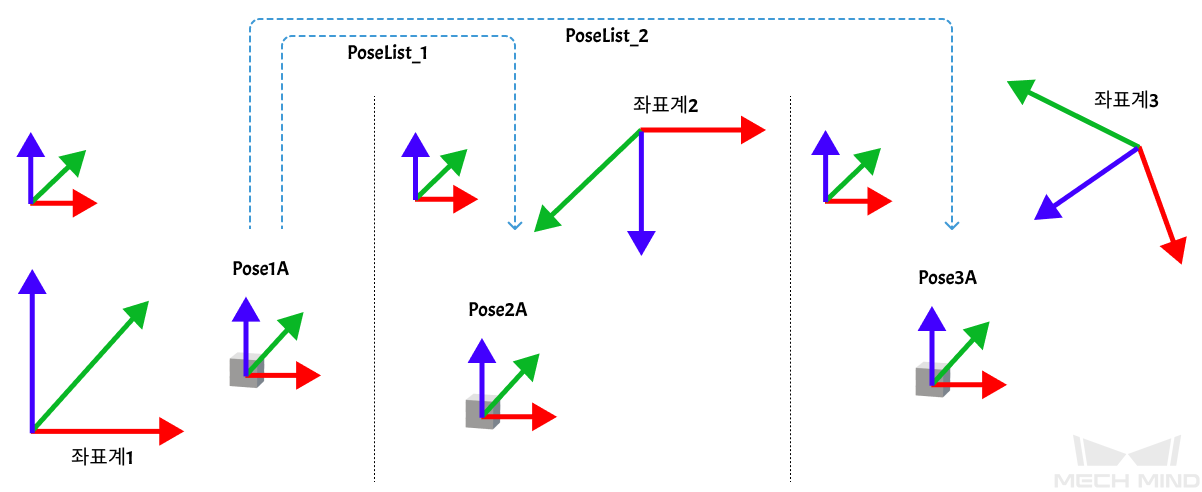
FirstWithAll:좌표계 1에서의 물체 A, B의 포즈 Pose1A, Pose1B가 알려진 경우 변환 유형을 FirstWithAll로 선택할 때(기준 포즈를 입력해야 함) 좌표계 2 및 좌표계 3에서의 물체 A의 포즈 Pose2A, Pose3A를 출력할 수 있습니다. 변환하는 동안 모든 기준 포즈를 사용하여 첫 번째 변환할 포즈를 변환해야 합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
-
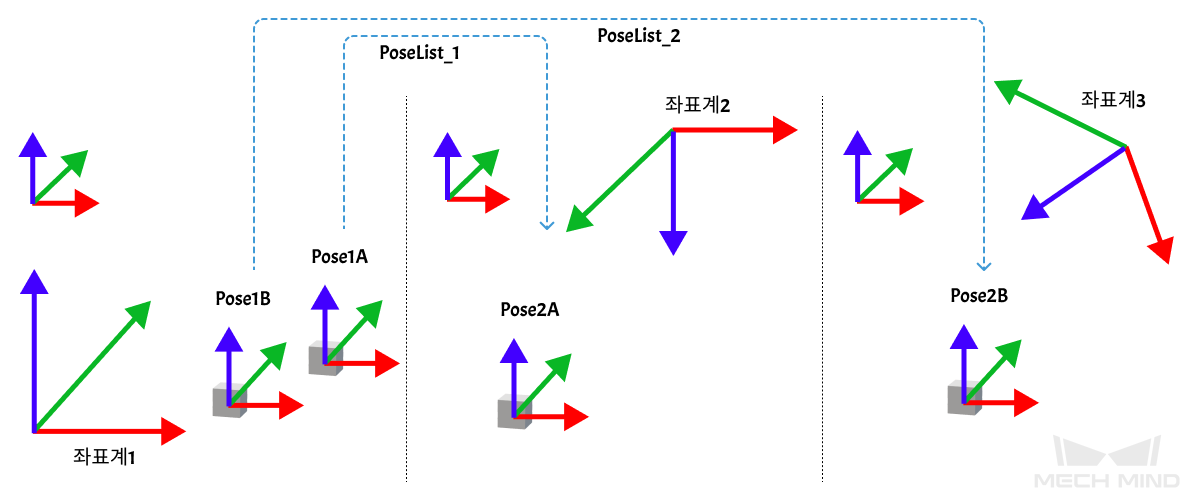
UseCorrespondenceInput:좌표계 1에서의 물체 A, B의 포즈 Pose1A, Pose1B가 알려진 경우 변환 유형을 UseCorrespondenceInput로 선택할 때(기준 포즈를 입력해야 함) 좌표계 2에서의 물체 A의 포즈 Pose2A와 좌표계 3에서의 물체 B의 포즈 Pose3B를 출력할 수 있습니다. 변환하는 동안 기준 포즈를 사용해서 1대1로 변환할 포즈를 변환해야 합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
-