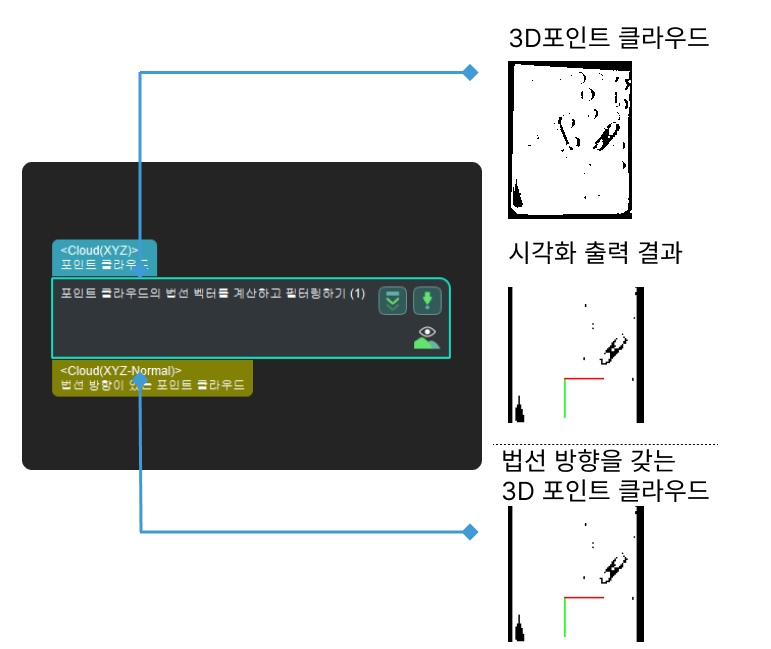
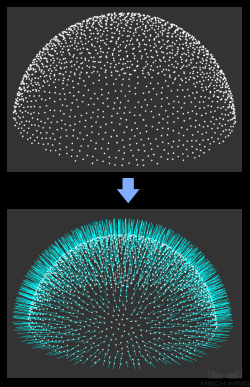
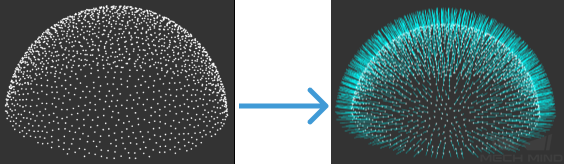
포인트 클라우드의 법선 벡터를 계산하고 필터링하기
|
이 스텝의 내용은 유지 보수 중입니다. 이 스텝에 대한 자세한 정보가 필요한 경우 (docs@mech-mind.net) 로 문의하십시오. |
응용 시나리오
카메라에서 이미지를 캡처하기, 뎁스 맵을 포인트 클라우드로 전환하기 스텝 뒤에 사용되고 원시 포인트 클라우드에 법선 방향을 추가하고 노이즈와 이상치를 제거합니다.
|
이 스텝의 내용은 유지 보수 중입니다. 이 스텝에 대한 자세한 정보가 필요한 경우 (docs@mech-mind.net) 로 문의하십시오. |
카메라에서 이미지를 캡처하기, 뎁스 맵을 포인트 클라우드로 전환하기 스텝 뒤에 사용되고 원시 포인트 클라우드에 법선 방향을 추가하고 노이즈와 이상치를 제거합니다.