Imaging Mechanism of Structured-Light Camera
As a structured-light 3D camera, Mech-Eye Industrial 3D Camera (“3D camera” for short) consists of a projector and 2D camera(s). With the assistance of the structured light projected by the projector, a 3D camera can acquire the depth data and 2D image of the target object in the way an ordinary 2D camera does.
The entire scanning process of the 3D camera can be divided into three phases: data acquisition, calculation and processing, and output. These phrases will be introduced in the sections below.
Data Acquisition
The 3D camera can acquire both the 2D and 3D data of a target object.
-
Process of acquiring 3D data:
-
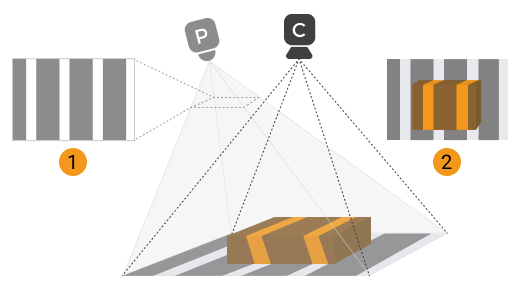
The projector (P in the figure below) projects stripe patterned light (① in the figure below) onto the surface of the target object. The pattern of light is distorted by the shape of the target object.
-
The 2D camera (C in the figure below) captures an image (② in the figure below) containing the distorted light pattern and the target object.
-
The projector continues to project structured light of different patterns, and the 2D camera continues to capture images for each light pattern.
-
-
Process of acquiring 2D data: When the projector is not projecting structured light, the image captured by the 2D camera is the 2D image of the target object.
Calculation and Processing
The 3D camera calculates the depth data of the object surface based on the distortion of the stripe patterns. Using the depth data, the 3D camera then generates the depth map and point cloud.
Output
The 3D camera outputs the generated data to Mech-Eye SDK or the GenICam client. Then you can see the 2D image, depth map and point cloud of the objects.
-
2D image: the image acquired by the 2D camera when the projector is not projecting structured light.
-
Depth map: an image containing depth information.
-
Point cloud: a collection of data points that contain the 3D coordinates (XYZ) of the object surface.