Structured-Light 3D Scanning Mechanism
As a structured-light 3D scanner, Mech-Eye Industrial 3D Camera (“3D camera”) consists of a projector and 2D camera(s). The projector projects structured light (light of pre-designed, specific patterns) onto the objects, and the shapes of the objects cause the light patterns to deform. Based on the deformation of the patterns, the 3D camera can calculate the depth data of the object surfaces.
The 3D camera can also obtain the 2D image of the objects, just like a regular 2D camera.
The entire scanning process of the 3D camera can be divided into three phases: image capturing, calculation and processing, and output.
Image Capturing
The 3D camera is triggered to capture images by Mech-Eye SDK. During image capturing, the following processes take place:
-
The projector (P in the figure below) projects stripe patterned light onto the objects. Due to the shapes and structures of the objects, the stripe patterns deform.
-
The 2D camera(s) (C in the figure below) captures images that record the deformation of the stripe patterns.
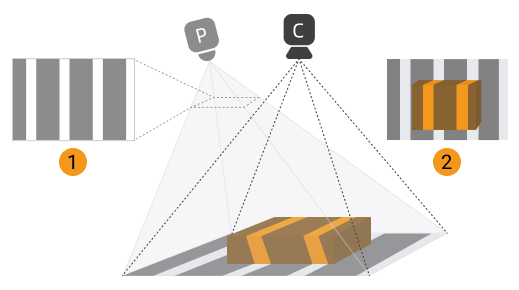
In the meantime, the 3D camera also captures the regular 2D image of the objects while the structured light is not projected.
Calculation and Processing
The 3D camera calculates the depth data of the object surfaces based on the deformation of the stripe patterns. Using the depth data, the 3D camera then generates the depth map and point cloud.
Output
The 3D camera outputs the generated data to Mech-Eye SDK. Now you can see the 2D image, depth map and point cloud of the objects!
-
2D image: the image captured without structured light projection.
-
Depth map: an image containing depth information.
-
Point cloud: a collection of data points that contain the 3D coordinates (XYZ) of the object surface.