DEEP
物理参数
型号 |
DEEP |
|---|---|
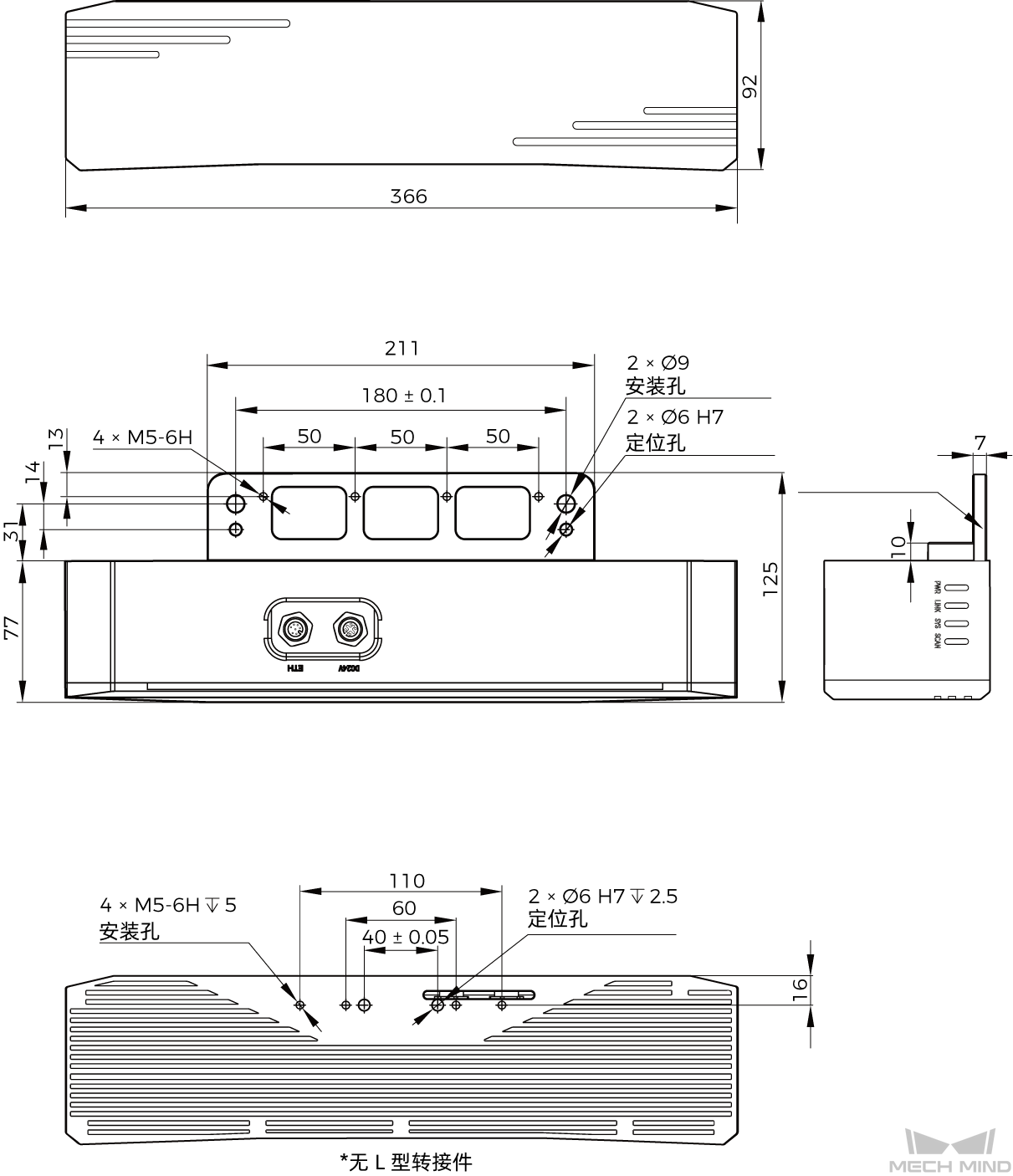
尺寸 |
366 × 77 × 92mm |
重量 |
2.4kg |
基线长度 |
300mm |
光源 |
红色激光(638nm,2类) |
工作温度 |
-10~45°C |
工作湿度 |
0~85%RH,无冷凝 |
存储温度 |
-20~60℃ |
通讯接口 |
千兆以太网 |
输入 |
24V DC,3.75A |
功率 |
待机:22W 平均:30W 峰值:60W |
防护等级(1) |
IP65 |
散热 |
被动 |
安装面平整度公差(2) |
± 0.05mm |
振动耐性(3) |
沿X、Y、Z轴的正弦振动,10~57Hz,1.5mm峰峰值,每轴3小时 |
冲击耐性(4) |
沿X、Y、Z轴正负方向的半正弦脉冲冲击,147m/s2(15g),11ms,每个方向3次,共18次 |
(1) 根据IEC 60529标准测试。其中,6代表防尘等级,5代表防水等级。
(2) 用于安装相机的表面的平整度需满足该要求。
(3) 根据IEC 60068-2-6标准测试。
(4) 根据IEC 60068-2-27标准测试。
性能参数
工作距离 |
1200~3500mm |
|---|---|
推荐工作距离 |
1800~3200mm |
对焦距离(1) |
2500mm |
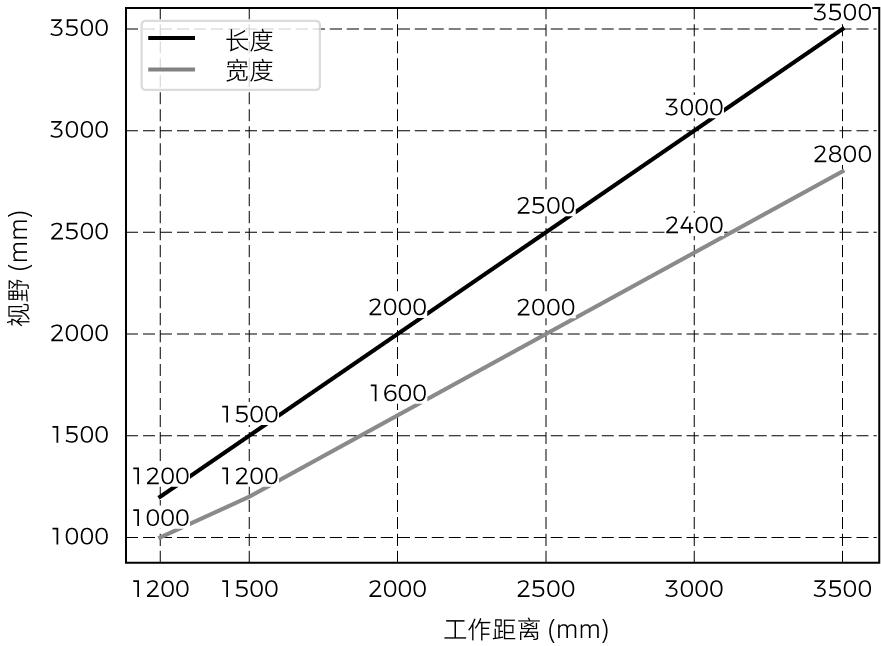
近端视野 |
1200 × 1000mm @ 1.2m |
远端视野 |
3500 × 2800mm @ 3.5m |
深度图分辨率(2) |
2048 × 1536 |
RGB图分辨率(3) |
2000 × 1500 |
典型采集时间(4),(5) |
0.5~0.9s |
推荐暖机时间(4),(6) |
30min |
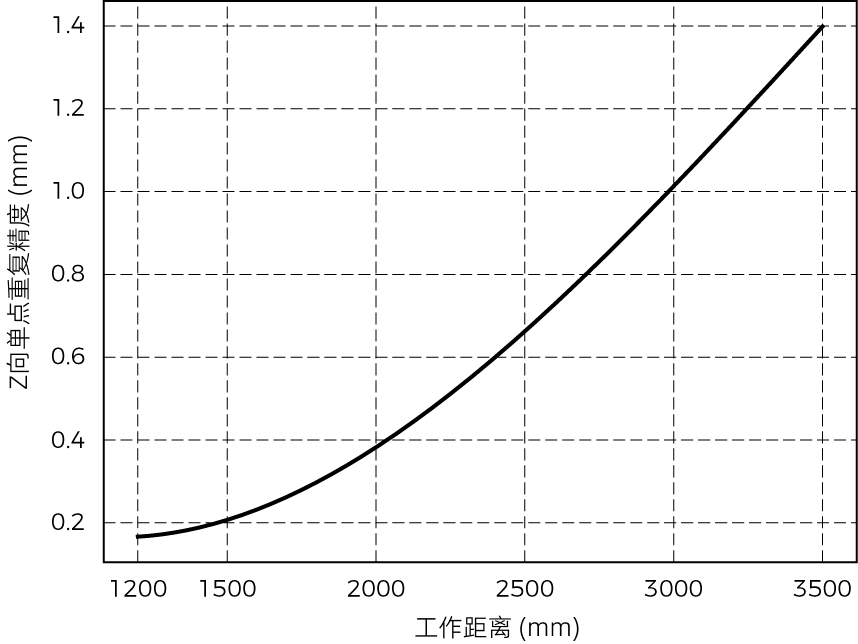
Z向单点重复精度(1σ)(4),(7) |
1.0mm @ 3.0m |
VDI/VDE测量精度(4),(8) |
3.0mm @ 3.0m |
(1) 本产品内部2D相机的对焦距离。
(2) 可通过Mech-Eye Viewer更改为1024 × 768。
(3) RGB图指Mech-Eye Viewer中的2D图(纹理)。
(4) 除另行说明的条件外,该测试在标准测试条件下进行。
(5) 在快速和精确编码模式下采集深度数据所用时间的范围。
(6) 保障数据精度达到标称值所需的推荐暖机时间。请在暖机工具中进行暖机,并根据实际的数据采集间隔、环境温度和散热条件适当调整暖机时间。
(7) 计算目标物体各点深度的100次测量值的1倍标准差,取所有1倍标准差的中位数。目标物体为表面粗糙的含95%氧化铝的白色陶瓷板。点云后处理参数均设置为Off。
(8) 参考VDI/VDE 2634 Part 2标准测试。
|
关于相机的规格型号,请查看相机工作范围。 |