Mitsubishi MELSEC
Mech-MSR은 외부 장치와 Mitsubishi MELSEC 통신이 가능합니다. 다음 내용을 읽기 전에 Mech-MSR에서 통신 설정이 완료되었는지 확인하세요.
Mitsubishi MELSEC 관련
미쓰비시 MC 시리즈 PLC는 MC 통신 프로토콜을 통해 Mech-MSR 소프트웨어와 데이터 상호 작용을 수행합니다. 이 통신 모드에서는 Mech-MSR이 클라이언트 역할을 하고 PLC는 서버 역할을 합니다.
통신 프로세스
통신에 사용되는 구조 유형은 총 200개의 D 레지스터를 차지합니다. 이 구조체 변수의 시작 주소는 Mech-MSR에서 설정한 레지스터(D) 시작 주소와 동일해야 합니다.
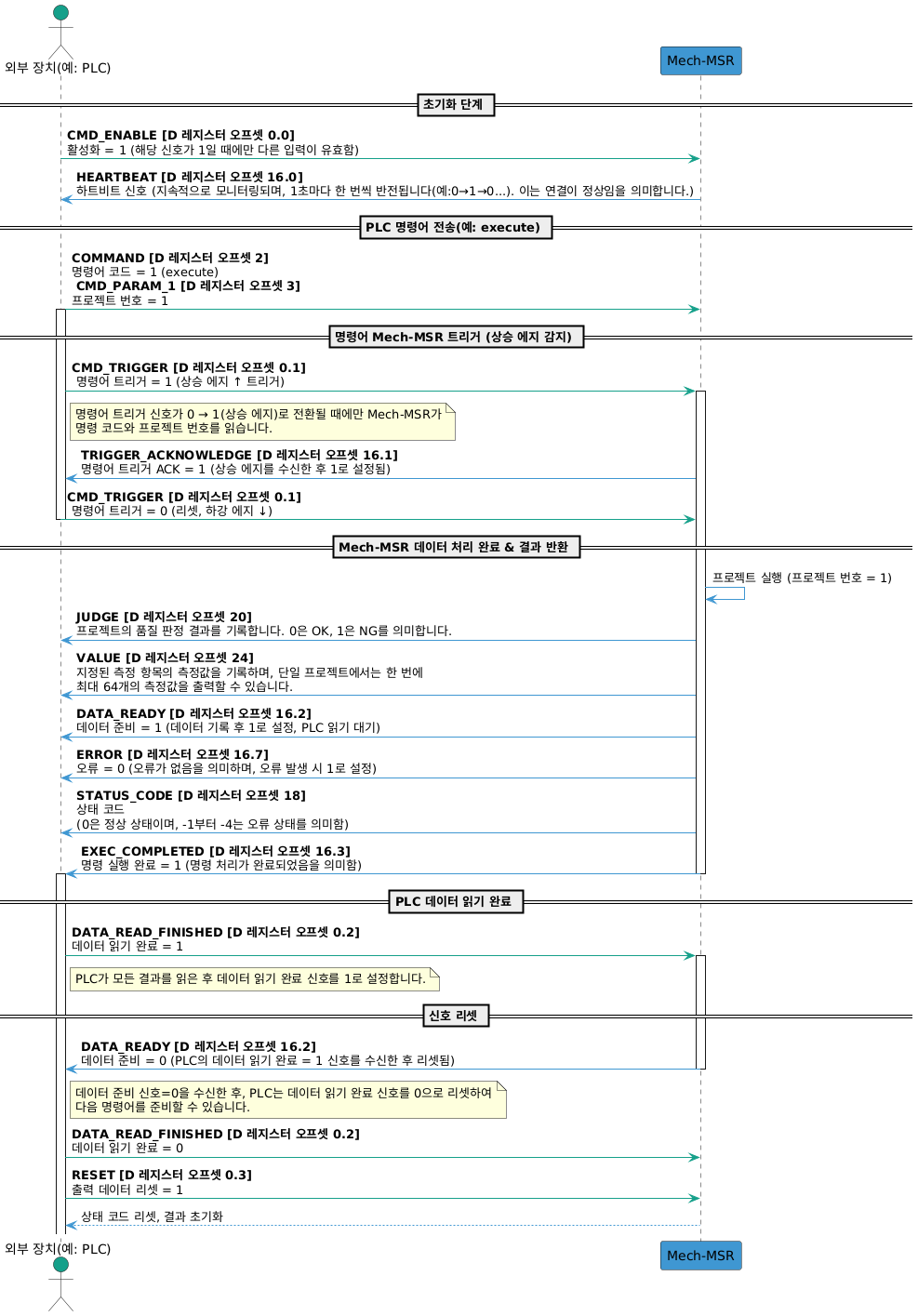
Mitsubishi MELSEC 통신 프로세스는 아래 그림과 같습니다.
입력 신호(PLC에서 Mech-MSR)
| 명칭 | 설명 | 데이터 유형 | D 레지스터 오프셋 |
|---|---|---|---|
명령을 활성화하는 신호입니다. |
부울 값 |
0.0 |
|
명령을 트리거하는 신호입니다. |
부울 값 |
0.1 |
|
데이터를 읽습니다. |
부울 값 |
0.2 |
|
출력 데이터가 재설정됩니다. |
부울 값 |
0.3 |
|
BIT_SPARE_1 |
보류된 필드입니다. |
부울 값 |
0.4 |
BIT_SPARE_2 |
보류된 필드입니다. |
부울 값 |
0.5 |
BIT_SPARE_3 |
보류된 필드입니다. |
부울 값 |
0.6 |
BIT_SPARE_4 |
보류된 필드입니다. |
부울 값 |
0.7 |
BIT_SPARE_5 |
보류된 필드입니다. |
부울 값 |
0.8~0.15 |
WORD_SPARE_1 |
보류된 필드입니다. |
Word[부호 있음] |
1 |
명령 코드 |
Word[부호 있음] |
2 |
|
CMD_PARAM_1 |
명령어 파라미터 1 |
Word[부호 있음] |
3 |
CMD_PARAM_2 |
명령어 파라미터 2 |
Word[부호 있음] |
4 |
CMD_PARAM_3 |
명령어 파라미터 3 |
Word[부호 있음] |
5 |
CMD_PARAM_4 |
명령어 파라미터 4 |
Word[부호 있음] |
6 |
CMD_PARAM_5 |
명령어 파라미터 5 |
Word[부호 있음] |
7 |
CMD_PARAM_6 |
명령어 파라미터 6 |
Word[부호 있음] |
8 |
CMD_PARAM_7 |
명령어 파라미터 7 |
Word[부호 있음] |
9 |
CMD_PARAM_8 |
명령어 파라미터 8 |
Word[부호 있음] |
10 |
CMD_PARAM_9 |
명령어 파라미터 9 |
Word[부호 있음] |
11 |
CMD_PARAM_10 |
명령어 파라미터 10 |
Word[부호 있음] |
12 |
VAR_1 |
변수 1 |
Float[부동 소수점] |
13~14 |
VAR_2 |
변수 2 |
Float[부동 소수점] |
15~16 |
VAR_3 |
변수 3 |
Float[부동 소수점] |
17~18 |
VAR_4 |
변수 4 |
Float[부동 소수점] |
19~20 |
VAR_5 |
변수 5 |
Float[부동 소수점] |
21~22 |
VAR_6 |
변수 6 |
Float[부동 소수점] |
23~24 |
VAR_7 |
변수 7 |
Float[부동 소수점] |
25~26 |
VAR_8 |
변수 8 |
Float[부동 소수점] |
27~28 |
VAR_9 |
변수 9 |
Float[부동 소수점] |
29~30 |
VAR_10 |
변수 10 |
Float[부동 소수점] |
31~32 |
WORD_SPARE_2 |
보류된 필드입니다. |
Word[부호 있음] |
33~63 |
CMD_TRIGGER(명령 트리거)
명령 트리거 신호가 0에서 1로 변경되는 상승 에지에서 Mech-MSR이 명령 코드와 명령 파라미터를 읽습니다. Mech-MSR이 명령 트리거 ACK 신호를 반환하면 명령 트리거 신호를 0으로 설정할 수 있습니다.
DATA_READ_FINISHED(데이터 읽기 완료)
PLC가 데이터 읽기를 완료한 후 이 신호를 1로 설정합니다. 데이터 준비 완료 신호가 0이 된 후에만 이 신호를 0으로 설정할 수 있습니다.
RESET(출력 데이터 리셋)
이 신호를 1로 설정하면 PLC가 수신한 판정 결과와 측정 결과(출력)가 초기화됩니다. 이때 PLC는 새로운 명령을 보낼 수 있으며 관련 상태 코드도 함께 리셋됩니다.
COMMAND(명령 코드)
현재 프로토콜에서 지원하는 명령과 해당 명령 코드, 명령 파라미터는 아래 표와 같습니다.
| 명령 | 명령 코드 | 명령 파라미터 | 설명 |
|---|---|---|---|
execute |
1 |
프로젝트 번호이며, 한 번에 1개만 설정할 수 있습니다. |
프로젝트를 트리거하고 해당 프로젝트의 판정 결과와 측정 결과를 가져오는 데 사용됩니다. |
trigger |
2 |
프로젝트 번호이며, 한 번에 1~4개까지 설정할 수 있습니다. |
프로젝트 실행을 트리거하는 데 사용됩니다. |
return |
3 |
프로젝트 번호이며, 한 번에 1개만 설정할 수 있습니다. |
지정한 프로젝트의 판정 결과와 측정 결과를 가져오는 데 사용됩니다. |
judge |
4 |
지정한 프로젝트의 전체 품질 판정 결과 또는 개별 측정 항목의 품질 판정 결과를 가져오는 데 사용됩니다. |
|
value |
5 |
주로 지정한 프로젝트의 측정값을 가져오는 데 사용됩니다. |
|
recipe |
6 |
프로젝트 번호, 파라미터 레시피 번호입니다. |
프로젝트에서 사용하는 파라미터 레시피를 전환하는 데 사용됩니다. |
solution |
7 |
솔루션 ID입니다. |
솔루션을 전환하는 데 사용됩니다. |
setNumVar |
8 |
전역 변수 번호이며, 한 번에 1개만 설정할 수 있습니다. |
숫자형 전역 변수의 값을 설정하는 데 사용되며, 변수 값은 VAR_INPUT를 통해 전달됩니다. |
getNumVar |
9 |
전역 변수 번호이며, 한 번에 1개만 설정할 수 있습니다. |
숫자형 전역 변수의 값을 읽는 데 사용되며, 읽기 결과는 VALUE를 통해 반환됩니다. |
VAR_INPUT(변수 입력)
setNumVar 명령을 실행할 때 설정한 값은 VAR_INPUT에 기록됩니다.
| 명칭 | 설명 | 데이터 유형 | D 레지스터 오프셋 |
|---|---|---|---|
VAR_1 |
변수 1 |
Float[부동 소수점] |
13~14 |
VAR_2 |
변수 2 |
Float[부동 소수점] |
15~16 |
VAR_3 |
변수 3 |
Float[부동 소수점] |
17~18 |
VAR_4 |
변수 4 |
Float[부동 소수점] |
19~20 |
VAR_5 |
변수 5 |
Float[부동 소수점] |
21~22 |
VAR_6 |
변수 6 |
Float[부동 소수점] |
23~24 |
VAR_7 |
변수 7 |
Float[부동 소수점] |
25~26 |
VAR_8 |
변수 8 |
Float[부동 소수점] |
27~28 |
VAR_9 |
변수 9 |
Float[부동 소수점] |
29~30 |
VAR_10 |
변수 10 |
Float[부동 소수점] |
31~32 |
출력 신호(Mech-MSR에서 PLC로)
| 명칭 | 설명 | 데이터 유형 | D 레지스터 오프셋 |
|---|---|---|---|
하트비트 신호 |
부울 값 |
64.0 |
|
명령 트리거 ACK |
부울 값 |
64.1 |
|
데이터 준비 완료 |
부울 값 |
64.2 |
|
명령 실행 완료 |
부울 값 |
64.3 |
|
BIT_SPARE_1 |
보류된 필드입니다. |
부울 값 |
64.4 |
BIT_SPARE_2 |
보류된 필드입니다. |
부울 값 |
64.5 |
BIT_SPARE_3 |
보류된 필드입니다. |
부울 값 |
64.6 |
오류 |
부울 값 |
64.7 |
|
종합 판정 결과 |
부울 값 |
64.8 |
|
BIT_SPARE_4 |
보류된 필드입니다. |
부울 값 |
64.9~64.15 |
WORD_SPARE_1 |
보류된 필드입니다. |
Word[부호 있음] |
65 |
상태 코드 |
Word[부호 있음] |
66 |
|
WORD_SPARE_2 |
보류된 필드입니다. |
Word[부호 있음] |
67 |
판정 결과 |
부울 값(0~63) |
68 |
|
측정 결과 및 변수 값 |
부동 소수점(0~63) |
72 |
TRIGGER_ACKNOWLEDGE(명령 트리거 ACK)
Mech-MSR이 명령 트리거 신호의 상승 에지를 수신하면 이 신호를 1로 설정합니다. 명령 트리거 신호가 하강 에지가 되면 이 신호를 0으로 설정합니다.
DATA_READY(데이터 준비 완료)
Mech-MSR이 출력 포트에 데이터를 기록한 후 PLC가 이를 읽기를 기다립니다. 데이터 읽기 완료 신호가 1이 되면 이 신호는 0으로 설정됩니다.
OVERALL_JUDGE(종합 판정 결과)
프로젝트의 종합 판정 결과이며, 1은 합격(OK), 0은 불합격(NG)을 의미합니다.
| Mech-MSR의 출력 관리 창에서 프로젝트의 품질 판정 규칙을 설정하고, 품질 판정 시 고려할 측정 항목을 결정해야 합니다. 구성을 완료한 후에만 유효한 품질 판정 결과를 얻을 수 있습니다. |
STATUS_CODE(상태 코드)
Mech-MSR이 반환할 수 있는 상태 코드는 다음과 같습니다.
-
정상 상태 코드: 1, 명령이 성공적으로 실행되었음을 나타냅니다.
-
오류 상태 코드: -1, -2, -3, -4, -5. 자세한 내용은 오류 상태 코드 설명을 참조하십시오.
JUDGE(판정 결과)
통신 출력 탭에 추가된 측정 항목의 품질 판정 결과입니다. 1은 합격(OK), 0은 불합격(NG)을 의미합니다.
| 단일 프로젝트에 대해 한 번에 최대 64개의 판정 결과를 출력할 수 있습니다. |
VALUE(측정 결과)
VALUE 모듈은 다음 데이터를 반환할 수 있습니다.
-
통신 출력 탭에 추가된 측정 항목의 측정 결과
-
getNumVar명령 실행 시 읽어온 숫자형 전역 변수의 값
| 단일 프로젝트에 대해 한 번에 최대 64개의 측정값을 출력할 수 있습니다. |