통신 및 I/O 제어
이 부분에서는 3D 측정 및 검사 응용에서 외부 장치(예: PLC), Mech-MSR 소프트웨어, 레이저 프로파일러 및 카메라 간의 상호작용 방식을 소개합니다.
개요
외부 장치(예: PLC)는 다음과 같은 방식으로 Mech-MSR 소프트웨어와 상호 작용할 수 있습니다.
-
통신 프로토콜
이는 외부 장치가 Mech-MSR 소프트웨어와 표준 또는 사용자 정의 산업용 통신 프로토콜을 기반으로 상호 작용하는 방법을 의미합니다.
Mech-MSR 소프트웨어는 다중 통신 프로토콜을 지원합니다. 예를 들어, TCP ASCII, PROFINET, Mitsubishi MELSEC(MC), EtherNet/IP, Modbus TCP, Siemens S7 등. 자세한 정보는 통신 프로토콜을 참조하세요.
-
I/O 제어
외부 장치가 레이저 프로파일러의 범용 디지털 입력/출력(DI/DO) 단자를 통해 Mech-MSR 소프트웨어와 상호작용하는 방식을 의미하며, 빠른 응답이나 고정된 사이클 타임이 요구되는 생산 시나리오에 적합합니다. 자세한 정보는 I/O 제어를 참조하세요.
대표 상호 작용 방식 (레이저 프로파일러 사용하는 시나리오)
레이저 프로파일러 사용하는 시나리오에서 Mech-MSR 소프트웨어는 레이저 프로파일러로부터 데이터(표면 데이터 또는 포인트 클라우드)를 수신해야 하며, 레이저 프로파일러의 데이터 수집 트리거하는 신호는 다음의 두 가지로 구분됩니다.
Mech-MSR 프로젝트의 실행 트리거 방식과 레이저 프로파일러의 데이터 수집 트리거 방식을 결합하면, 3D 측정 및 검사 응용은 다음과 같은 대표적인 상호작용 방식을 지원합니다.
| 방식 | Mech-MSR 프로젝트 실행 트리거 방식 | 레이저 프로파일러 데이터 수집 트리거 소스 | 외부 장치 결과 획득 방식 |
|---|---|---|---|
통신 명령어 |
소프트웨어 트리거 |
통신 명령어 |
|
이미지 업데이트 시 실행 |
외부 입력 신호 |
TCP ASCII 프로토콜 또는 DO 신호 |
|
DI 신호 |
외부 입력 신호 |
TCP ASCII 프로토콜 또는 DO 신호 |
|
통신 명령어 |
외부 입력 신호 |
통신 명령어 |
|
DI 신호 |
소프트웨어 트리거 |
DO 신호 |
방식 1: 통신 프로토콜 + 소프트웨어 트리거
이 방식에서는 외부 장치와 Mech-MSR이 프로토콜 기반으로 통신하며, 레이저 프로파일러는 Mech-MSR에 의해 트리거되어 데이터 수집을 수행합니다.
장점 |
Mech-MSR에서 레이저 프로파일러의 파라미터 그룹을 간편하게 전환할 수 있습니다. |
|---|---|
단점 |
통신 트리거와 소프트웨어 트리거 방식이 모두 시간 지연이 발생하며, 이러한 지연은 불안정합니다. 트리거 링크에는 여러 비즉시성 단계가 포함되어 있어 정밀한 타이밍 제어가 어렵습니다. 따라서 본 방식은 운동 플랫폼과의 동기화가 필요한 시나리오나 고정 빈도로 데이터 획득이 요구되는 시나리오에는 적합하지 않습니다. |
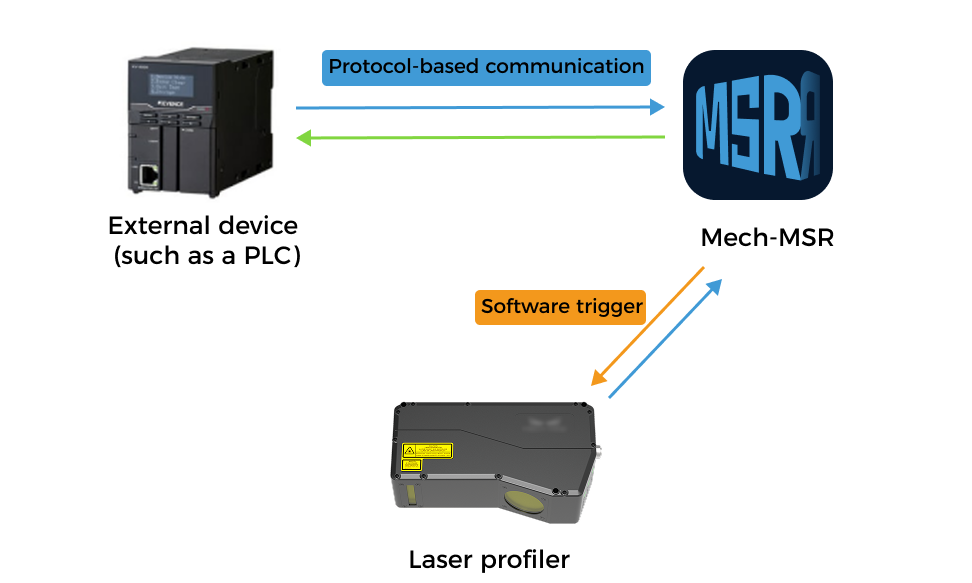
외부 장치, Mech-MSR 및 레이저 프로파일러 간의 상호 작용 흐름은 다음과 같습니다.
-
외부 장치는 명령어를 전송하여 Mech-MSR 프로젝트 실행을 트리거 합니다.
-
Mech-MSR 프로젝트 실행이 시작되어 레이저 프로파일러를 트리거하고 데이터 획득을 수행합니다;
-
Mech-MSR 소프트웨어는 레이저 프로파일러에서 획득한 데이터를 수신한 후 프로젝트를 계속 실행하며, 종료 시점까지 진행합니다;
-
Mech-MSR 소프트웨어는 외부 장치로부터 수신한 명령어에 따라, 해당 결과를 외부 장치로 반환합니다.
방식 2: 이미지 업데이트 시 실행 + 외부 트리거
이 방식에서는 외부 장치가 레이저 프로파일러를 트리거하여 데이터 획득을 수행하며 Mech-MSR 소프트웨어가 수집된 데이터를 수신한 후 프로젝트를 실행합니다.(즉, 이미지 업데이트 시 실행을 활성화함) 동시에 TCP ASCII 프로토콜 또는 DO 신호로 프로젝트 실행 결과를 외부 장치에 전송합니다.
장점 |
외부 트리거는 지연 없이 신속하게 작동합니다. |
|---|---|
단점 |
레이저 프로파일러의 파라미터 그룹을 전환할 수 없기 때문에, 본 방식은 하나의 레이저 프로파일러를 여러 Mech-MSR프로젝트에서 공용으로 사용하는 시나리오에는 적합하지 않습니다. 즉, 레이저 프로파일러의 파라미터 그룹을 파라미터별로 다르게 설정할 수 없습니다. |
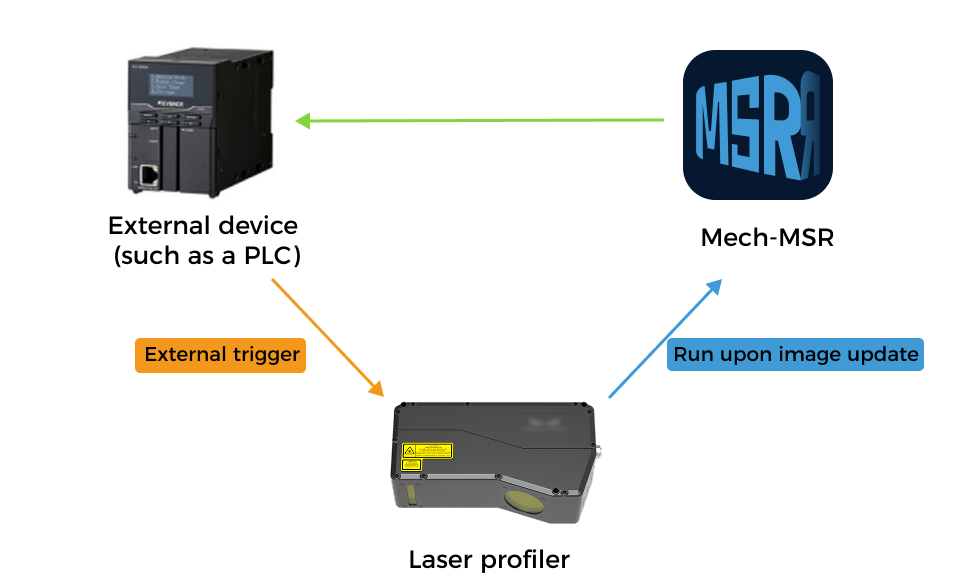
외부 장치, Mech-MSR 및 레이저 프로파일러 간의 상호 작용 흐름은 다음과 같습니다.
-
외부 장치가 레이저 프로파일러를 트리거하여 데이터 획득을 수행합니다;
-
Mech-MSR에서 해당 레이저 프로파일러를 사용한 프로젝트가 이미지 업데이트 시 실행을 활성화하며 레이저 프로파일러가 획득한 데이트를 수신한 후 프로젝트가 자동으로 실행됩니다.
-
Mech-MSR 소프트웨어는 설정에 따라 프로젝트 실행 결과를 외부 장치에 전송합니다.
외부 장치가 프로젝트 실행 결과를 받는 방식은 두 가지가 있습니다.
-
TCP ASCII 프로토콜이 지원한 자동으로 결과 푸시 기능으로 모든 결과를 신속하게 받습니다.
-
Mech-MSR의 DO 구성을 바탕으로 레이저 프로파일러의 범용 DO 단자를 통해 Mech-MSR 프로젝트의 전체 품질 판정 결과를(OK 또는 NG) 획득합니다.
-
방식 3: DI 트리거 + 외부 트리거
이 방식에서는 외부 장치가 레이저 프로파일러를 트리거하여 데이터 획득을 수행하며, 범용 DI 단자를 통해 Mech-MSR 프로젝트 실행을 트리거하고 TCP ASCII 프로토콜 또는 DO 신호를 통해 프로젝트 실행 결과를 획득합니다.
장점 |
외부 트리거는 지연 없이 신속하게 작동합니다. |
|---|---|
단점 |
레이저 프로파일러의 파라미터 그룹을 전환할 수 없기 때문에, 본 방식은 하나의 레이저 프로파일러를 여러 Mech-MSR프로젝트에서 공용으로 사용하는 시나리오에는 적합하지 않습니다. 즉, 레이저 프로파일러의 파라미터 그룹을 파라미터별로 다르게 설정할 수 없습니다. |
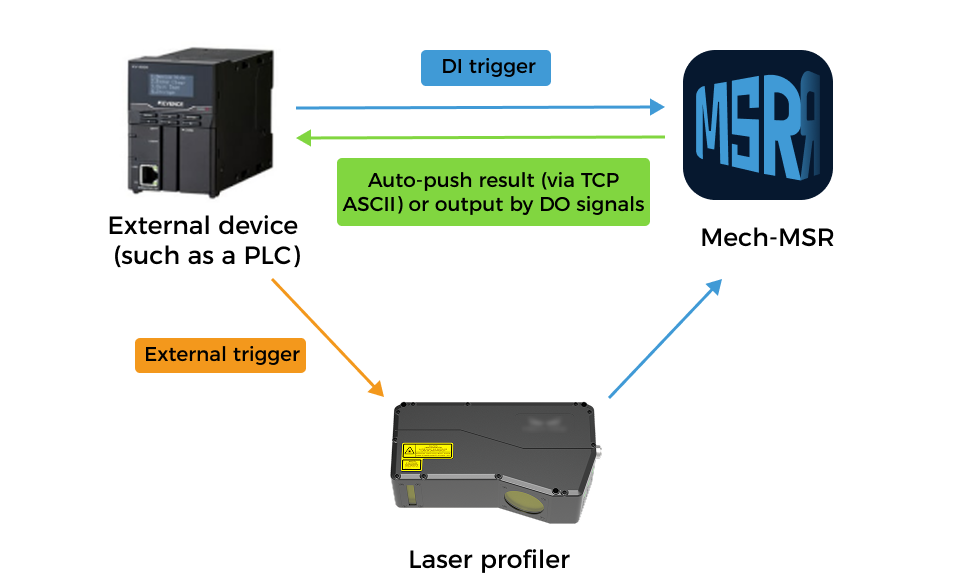
외부 장치, Mech-MSR 및 레이저 프로파일러 간의 상호 작용 흐름은 다음과 같습니다.
-
외부 장치가 레이저 프로파일러를 트리거하여 데이터 획득을 수행합니다;
-
외부 장치는 Mech-MSR의 DI 구성을 기반으로 레이저 프로파일러의 범용 DI 단자로 대응하는 Mech-MSR 프로젝트 실행을 트리거합니다.
-
Mech-MSR 소프트웨어는 설정에 따라 프로젝트 실행 결과를 외부 장치에 전송합니다.
외부 장치가 프로젝트 실행 결과를 받는 방식은 두 가지가 있습니다.
-
TCP ASCII 프로토콜이 지원한 자동으로 결과 푸시 기능으로 모든 결과를 신속하게 받습니다.
-
Mech-MSR의 DO 구성을 바탕으로 레이저 프로파일러의 범용 DO 단자를 통해 Mech-MSR 프로젝트의 전체 품질 판정 결과를(OK 또는 NG) 획득합니다.
-
방식 4: 통신 프로토콜 + 외부 트리거
이 방식에서는 외부 장치가 레이저 프로파일러를 트리거하여 데이터 취득을 수행함과 동시에, Mech-MSR 소프트웨어와는 프로토콜 기반으로 통신합니다.
장점 |
외부 트리거는 지연 없이 신속하게 작동합니다. |
|---|---|
단점 |
레이저 프로파일러의 파라미터 그룹을 전환할 수 없기 때문에, 본 방식은 하나의 레이저 프로파일러를 여러 Mech-MSR프로젝트에서 공용으로 사용하는 시나리오에는 적합하지 않습니다. 즉, 레이저 프로파일러의 파라미터 그룹을 파라미터별로 다르게 설정할 수 없습니다. |
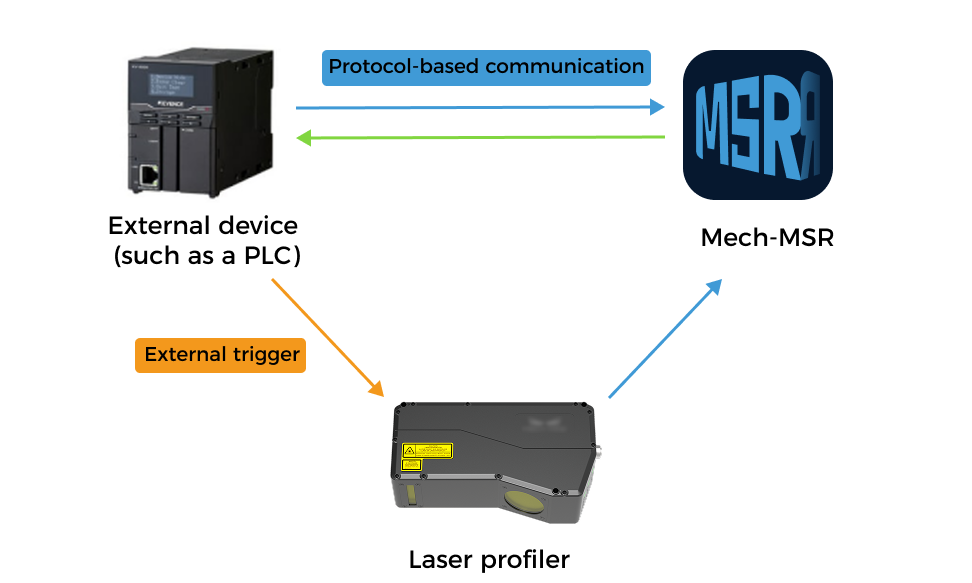
외부 장치, Mech-MSR 및 레이저 프로파일러 간의 상호 작용 흐름은 다음과 같습니다.
-
외부 장치가 레이저 프로파일러를 트리거하여 데이터 획득을 수행합니다;
-
외부 장치는 명령어를 전송하여 Mech-MSR 프로젝트 실행을 트리거 합니다.
-
Mech-MSR 소프트웨어는 외부 장치로부터 수신한 명령어에 따라, 해당 결과를 외부 장치로 반환합니다.
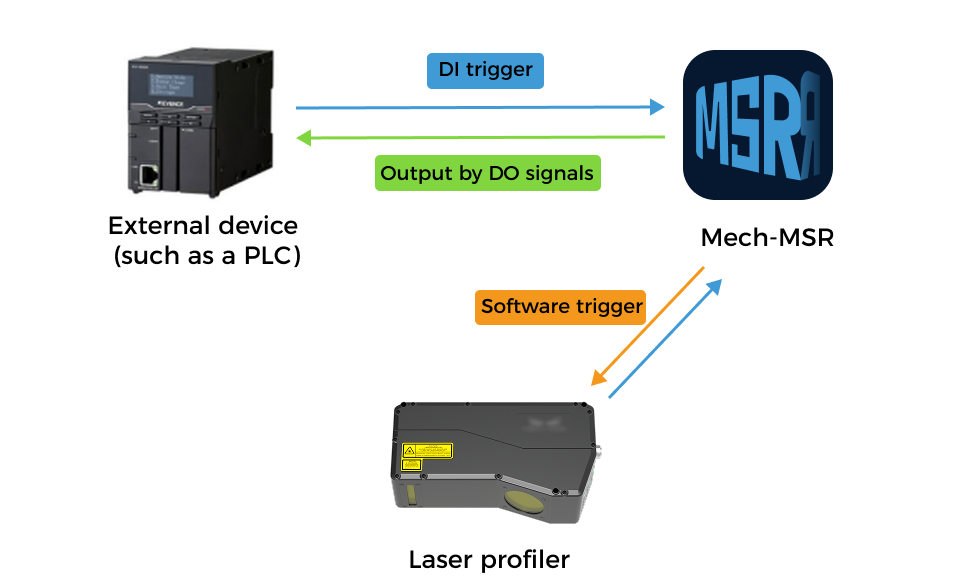
방식 5: DI 트리거 + 소프트웨어 트리거
이 방식에서는 외부 장치가 레이저 프로파일러의 범용 DI 단자를 통해 Mech-MSR 프로젝트 실행을 트리거하고, DO 신호를 통해 프로젝트 실행 결과를 획득합니다. 여기서 레이저 프로파일러의 데이터 취득은 Mech-MSR 트리거 방식으로 수행됩니다.
장점 |
하드웨어 연결 방식으로, 별도의 프로그래밍이 필요하지 않습니다. |
|---|---|
단점 |
외부 장치는 프로젝트의 종합 품질 판정 결과(OK 또는 NG)만을 획득할 수 있으며, 개별 측정값 및 해당 측정값에 대한 판정 결과는 획득할 수 없습니다. |
외부 장치, Mech-MSR 및 레이저 프로파일러 간의 상호 작용 흐름은 다음과 같습니다.
대표 상호 작용 방식 (2D/3D 카메라 사용하는 시나리오)
2D/3D 카메라를 사용하는 3D 측정 및 검사 응용에서 외부 장치, Mech-MSR 및 카메라 간의 상호작용 워크플로는 다음과 같습니다.
-
외부 장치는 명령어를 전송하여 Mech-MSR 프로젝트 실행을 트리거 합니다.
-
Mech-MSR 프로젝트 실행이 시작하고 카메라 이미지 획득이 트리거됩니다.
-
Mech-MSR 소프트웨어는 카메라에서 획득한 이미지를 수신한 후 프로젝트를 계속 실행하며, 종료 시점까지 진행합니다;
-
Mech-MSR 소프트웨어는 외부 장치로부터 수신한 명령어에 따라, 해당 결과를 외부 장치로 반환합니다.