通知
パラメータ
通信設定
- インターフェース通信受信側
-
パラメータ説明:このパラメータは、インターフェース通信の方式を選択するために使用されます。
オプション:標準インターフェース通信、アダプター
アダプター通信方式を使用する場合、プロジェクト内に複数の通知ステップが存在するときは、すべての通知ステップの Adapter名 を統一する必要があります。
- メッセージ
-
パラメータ説明:カスタムメッセージを編集します。Adapter はメッセージ内容に応じて異なるロジックを実行します。例えば、分岐実行の終了時にはメッセージを finish に設定します。
- 失敗した時の動作
-
パラメータ説明:通知メッセージの送信に失敗した場合、ソフトウェアが実行する処理方法を選択します。
オプション:ワーニング、再試行、破棄
- ロボット要停止
-
パラメータ説明:チェックを入れると、ロボットはこのステップで動作を一時停止します。チェックを外すと、ロボットは動作しながらメッセージを送信します。
- タイムアウト
-
パラメータ説明:指定した時間内にメッセージが送信されない場合、ロボットは 失敗した時の動作 を実行します。
例
Adapterに計画失敗メッセージを送信
ビジョン処理による移動ステップで経路計画が失敗した場合、当該ステップは失敗メッセージを Adapter に送信できます。
下図に示すように、ビジョン処理による移動テップの後ろに通知ステップを接続し、インターフェース通信受信側をアダプターに、メッセージを finish に設定すると、計画失敗時の情報(失敗情報は finish )をAdapterに送信できます。

ロボットと連携した「撮影即移動」
標準インターフェース通信におけるEIHでは、「撮像即移動」を実現するために、ワークフローに通知ステップを追加する必要があります。
-
Mech-Visionでの順にクリックし、撮影完了後、「1102:トリガー成功」を返す」にチェックを入れます。
-
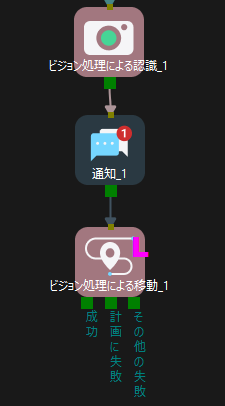
Mech-Vizで通知ステップを追加し、ビジョン処理による認識ステップの直後に接続します。下図のようです。通知ステップが露光完了のメッセージをロボットに送信した後、ロボットはMech-Visionプロジェクトの実行終了を待つことなく、直ちに移動できます。
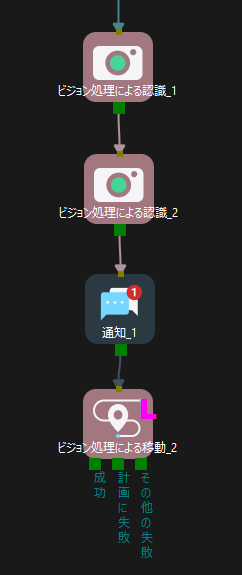
複数台のカメラで撮像を行う必要がある場合は、通知 ステップを複数のビジョン処理による認識ステップの後に接続します。