衝突検出設定
このパレットでは、衝突検出を設定します。ロボット経路を計画する時、実際の衝突を回避するため、Mech-Viz の仮想空間で衝突が発生する恐れのある部分がハイライト表示され、プロジェクトの実行を停止します。
衝突検出パラメータの調整とトラブルシューティングについての詳細な説明は、特集:衝突検出をお読みください。
衝突検出設定を確認する
このグラフは、衝突検出の設定を動的に表示します。凡例をクリックしてグラフの表示色の意味を確認できます。また、セルにカーソルを合わせると当該衝突検出を使用する方法が表示されます。
点群衝突検出
衝突検出に使用する物体の数、位置、形状・サイズなどが分からない、かつ事前にシーンの物体を追加できずにビジョン処理の結果を使用するしかない場合に、点群衝突検出を有効にする必要があります。
点群衝突検出の対象が多いほどロボット移動中の衝突リスクは低下しますが、経路計画にかかる時間もそれに応じて長くなります。
衝突検出に使用する点群の形式
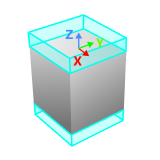
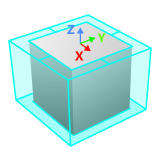
| 点群立方体 | 点群柱 |
|---|---|
点群立方体で点群の表面を充填して衝突検出の計算を行う |
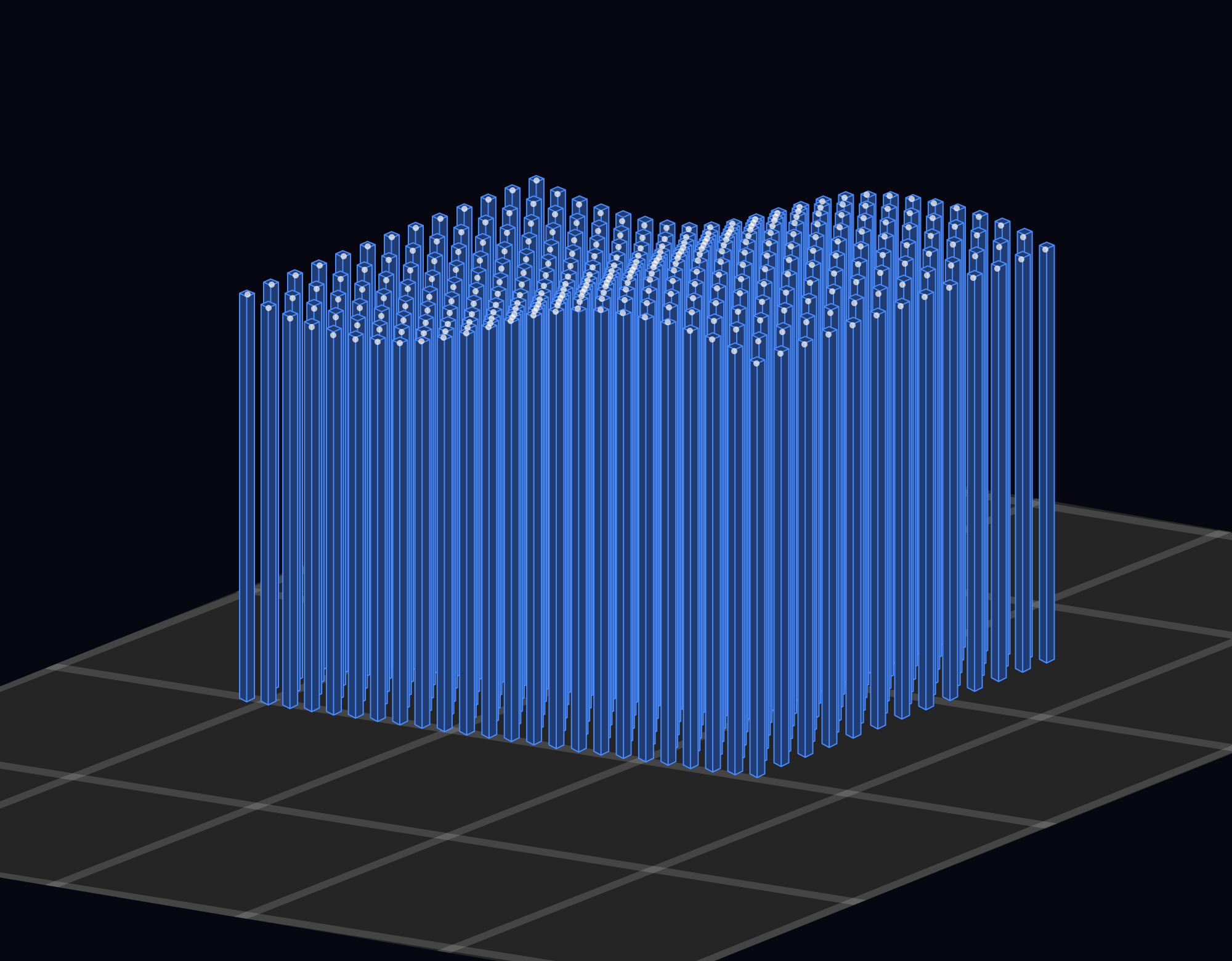
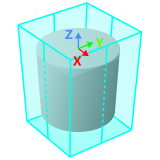
点群柱で世界座標系のZの負方向に沿って点群の下部を充填し、衝突検出の計算を行う。点群柱の底面位置を設定することで、世界座標系における点群柱の延長長さを確認可能 |

|
|
| ロボットハンドモデルが STL 形式の場合、点群柱を推奨します。その理由については、ロボットハンドモデルをお読みください。 |
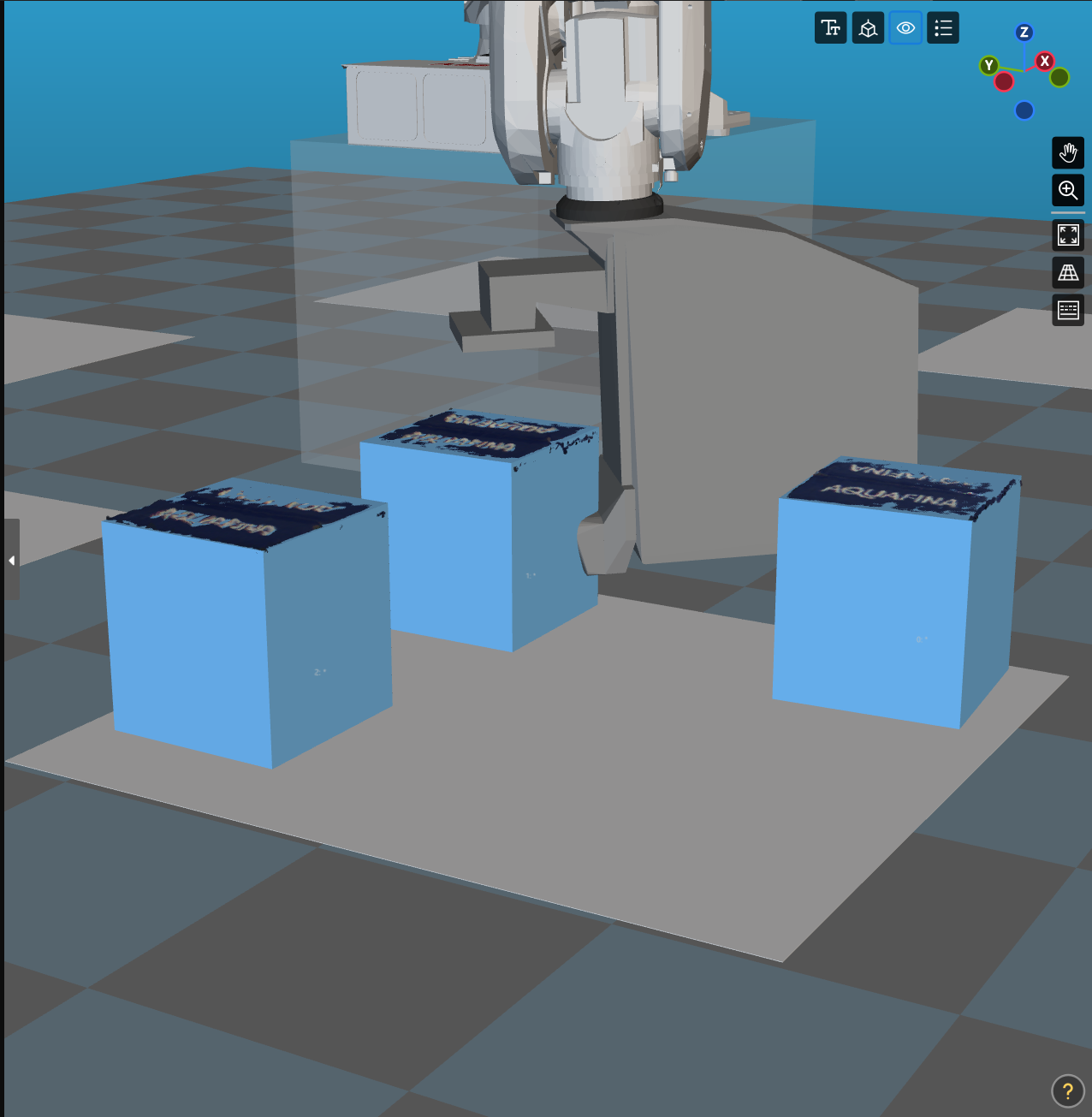
デパレタイジングのプロジェクトにおいては、点群柱を使用することで、吸盤で箱を把持する際(特に側面を吸着する場合)に他の箱との衝突を回避できます。
| ロボットハンドと箱の衝突 | 点群立方体を使用する時に検出漏れ | 点群柱を使用する時に検出可能 |
|---|---|---|
|
|
|
衝突検出に使用する点群の形式 |
適用シーン |
点群柱 |
Mech-Vision プロジェクトで一部のワークが認識されず、上面の点群しか表示されない場合。点群柱を使用して完全な対象物衝突モデルが生成でき、ロボットハンドがその他のワークを把持する時に点群の下部を通過して衝突することを回避可能(下図参照)
|
変形したコンテナに対し、点群柱を使用して側壁の衝突モデルを正確に生成できるので、衝突を回避可能
|
|
デパレタイジング、箱の側面を吸着するシーン |
|
点群立方体 |
ロボットハンドが水平方向または斜め方向に対象物を通過するシーン(下図参照)。リング状のワークに対し、ロボットハンドが斜めに内径把持を実行する場合、点群柱が地面に対して垂直に生成されるため、ロボットハンドは必然的に点群柱と衝突するので、点群立方体を推奨
|


対象物衝突検出
当機能を有効するには、ワークライブラリで対象物の衝突モデルを設定する必要があります。以下の場合に限り有効にしてください。
-
ロボットハンドと対象物とは許容できない衝突が発生する恐れがある
-
対象物のサイズが大きくてシーンの物体と衝突しやすい
-
経路が一定ではない(例えばコンテナ内のスマート経路生成ステップを使用する)
-
混載パレタイジング
当機能を有効すると、把持前に Mech-Viz はロボットハンドと対象物、ロボットと対象物の衝突を検出します。把持後、Mech-Viz は把持されている対象物とロボット、把持されている対象物とシーンの物体の衝突を検出します。
| 当機能を有効した後、Mech-Vision では位置姿勢調整ステップを実行して把持位置姿勢を調整しないでください。調整を行うと、生成された衝突モデル位置姿勢が間違い、さらに対象物とロボットハンドの衝突を誤判断する恐れがあります。 |
よくある問題と解決策
実行中、以下のような問題が発生した時、ソフトウェアでその右のボタンをオンにしてガイドに従ってパラメータ設定を行ってください。
問題1:吸着パッドで箱などを把持する際、ロボットが誤把持、あるいは隣のワークを押しつぶすことがある
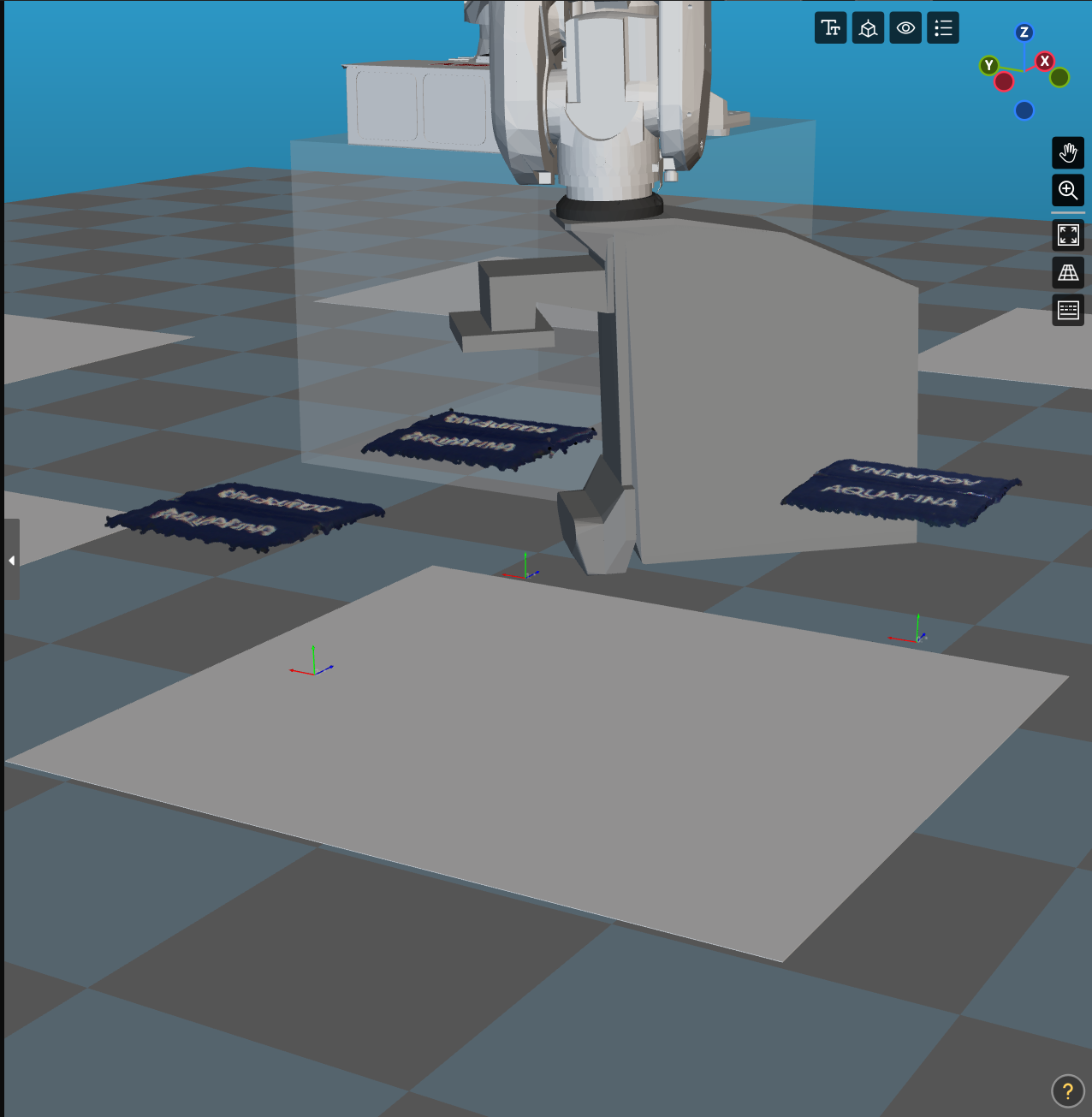
吸着パッドで箱などを把持する時、吸着パッドが対象物を密着押圧すると、両者の間に衝突が発生したと判断されて把持が失敗します。対象物の点群を除去することでロボットハンドと対象物の接触が衝突と判断されることを回避できます。一方、対象外の未把持物体の点群は保持されて衝突検出に使用することで、誤把持や衝突を回避できます。
対象物の点群が完全に除去するためには、除去範囲を対象物の表面に沿って一定距離外側に拡張する必要があります。
Z 方向点群除去範囲拡張は、対象物位置姿勢の垂直方向(Z 軸)に沿って拡張する長さを決めます。円柱または円筒状の対象物の場合、このパラメータは円柱または円筒の高さ・長さを拡張します。
XY 方向点群除去範囲拡張は、対象物位置姿勢の水平方向(XOY 平面)に沿って拡張する長さを決めます。円柱または円筒状の対象物の場合、このパラメータは円柱または円筒の外径を拡張します。
| Z 方向点群除去範囲拡張 | XY 方向点群除去範囲拡張 | |
|---|---|---|
直方体 |
|
|
円柱 |
|
|
問題2:バラ積みの対象物に対しては実行可能な把持経路を計算することが困難
ロボットが対象物を把持する際(特にバラ積みの対象物)、ロボットハンドと対象物、また対象物と別の物体は、衝突は発生する可能性があります。把持点付近のわずかな接触が実際には許容できるものの、衝突と判断されて計画失敗した場合、以下の解決法を試してください。
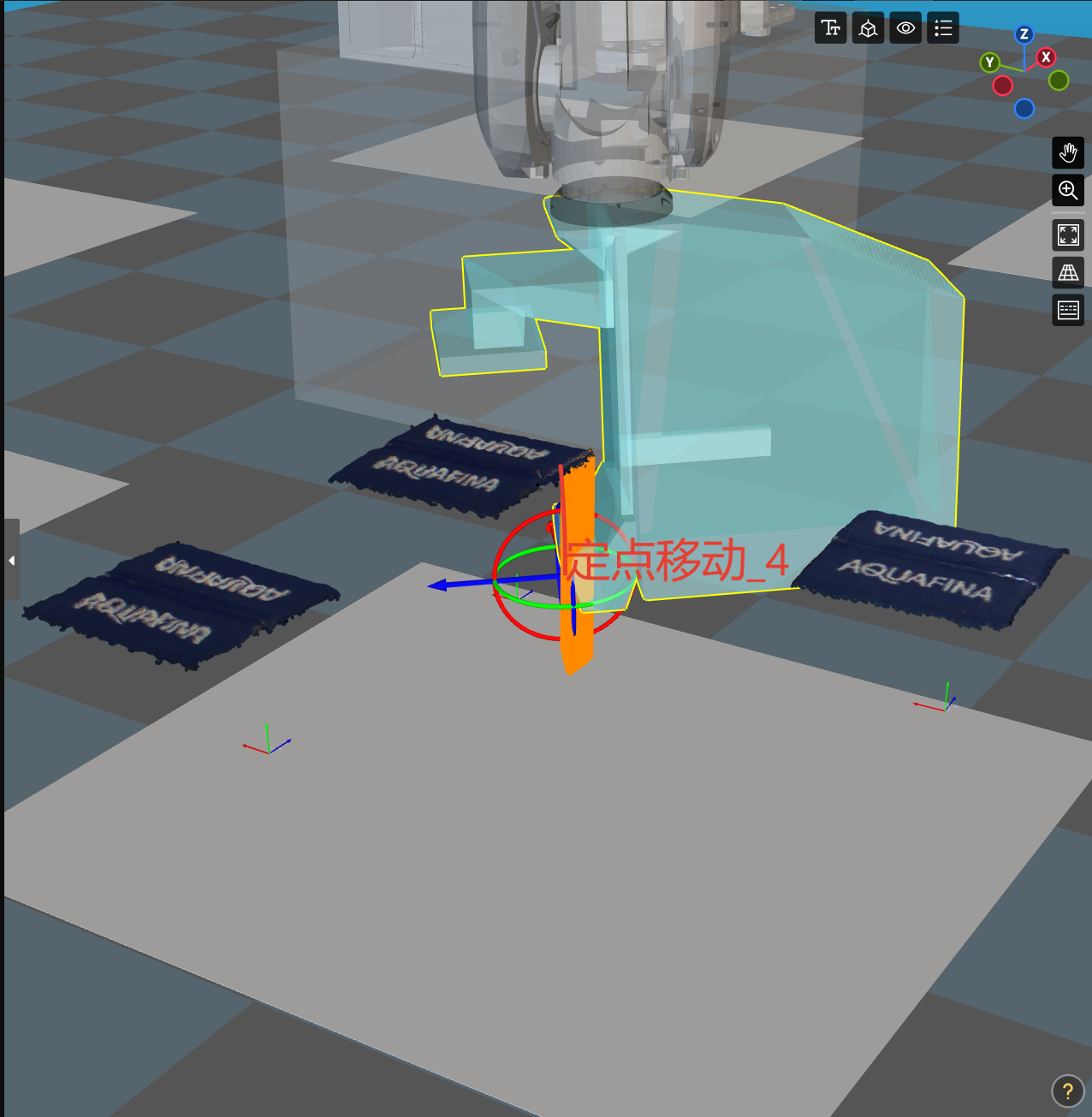
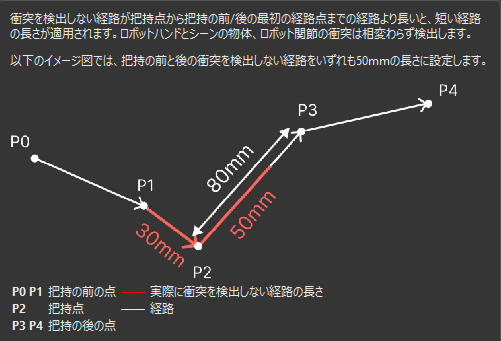
点群衝突検出または対象物衝突検出を有効にすると、把持点と把持の前・後の最初の経路点との間に、一定の長さの経路を指定し、その部分の経路における把持されている対象物とその他の物体の衝突を検出しないように設定します。ロボットハンドとシーンの物体、ロボット関節との間の衝突は常に検出されます。
有効にすると、衝突が発生する恐れがあります。重大な衝突を防ぐため、検出しない経路を過度に長く設定しないでください。
衝突を検出しない経路の長さを、把持点から把持の前・後の最初の経路点までの距離より長く設定した場合、実際に適用されるのはいずれか短い方の長さを基準とします。
下図に示すように、把持前と把持後の検出しない経路はともに 50mm に設定されていますが、実際に適用されるのは 30mm です。
問題3:混載パレタイジングのプロジェクトでは箱のサイズがバラバラで衝突が発生しやすい
把持されている箱と隣の箱の衝突を回避するために、箱の衝突モデルの高さを下に伸ばします。下に伸ばす高さは混載パレットパターンステップの経路計画にだけ使用できます。