カメラの取り付け要件
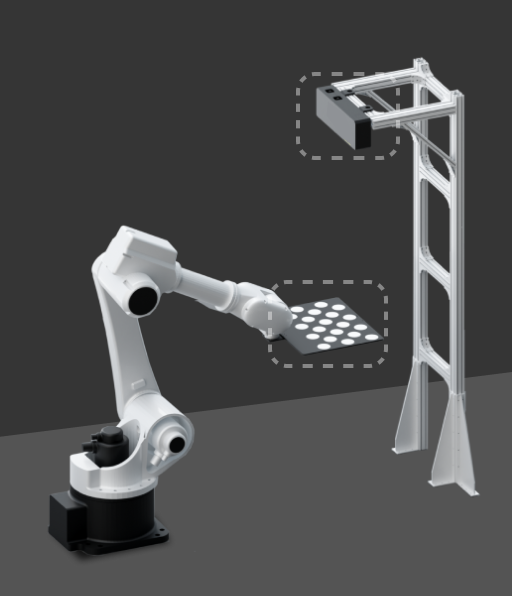
カメラの一般的な取り付け方式には Eye to Hand(ETH) と Eye in Hand(EIH) の2種類があります。カメラとロボットの相対位置や全体のサイクルタイム要求に応じて選択できます。各方式の特徴と利点は、以下の表のとおりです。
取り付け方式 |
Eye to hand(ETH) |
Eye in hand(EIH) |
|---|---|---|
特徴 |
カメラがブラケットに取り付けられています。 |
カメラはロボット先端に取り付けられています。 |
イメージ図 |
|
|
利点 |
|
|

また、取り付け方式の違いにより、カメラブラケットの取り付け方法やケーブル配線などの要件も異なります。具体的には以下のとおりです。
カメラの取り付け要件(ETHの場合)
カメラブラケットに取り付ける場合、安定性、信頼性、およびケーブルの配線に注意する必要があります。また、取得される画像の正確性を確保する必要があります。以下のことに注意してください。
-
カメラブラケットの固定
カメラブラケットを地面、壁などに固定するためには、膨張ボルトまたはケミカルボルトのいずれかを使用できます。これにより、カメラが揺れないように安定かつ信頼性のあるサポートが提供されます。
基礎ボルトの本数や種類は、ブラケットの高さや構造形式によって異なります。地面以外の取り付け方法では、カメラブラケットを側壁、地面、または天井で補強する可能性があります。

-
カメラケーブルの配置
カメラのケーブルを、柱の表面に配置されたケーブルトレイ内に取り付けて、整然とした配線を行ってください。これにより、ケーブルの安全性と整然が確保されるだけでなく、メンテナンスも容易になります。
-
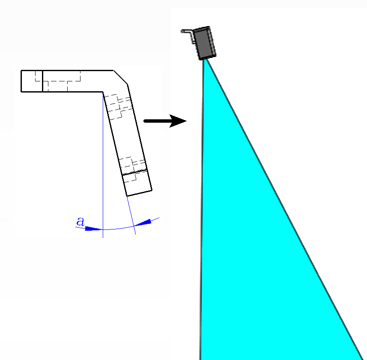
カメラ取り付け角度の調整
通常、カメラは垂直方向に向けて取り付けられます。しかし、天井の高さが制限されているプロジェクト現場では、取り付け角度を調整するためにカメラを傾ける方法を使用できます。プロジェクトの設計初期段階では、シミュレーションおよびテストを実施し、実際の要件を満たしていることを確認することが推奨されます。
-
カメラ視野の確認
-
カメラの有効撮影視野
カメラの有効撮影視野とは、カメラが完全な点群データを取得できる物理的な範囲を指します。以下を確認してください。
-
供給容器(コンテナ/パレット)および内部のワークが、この視野内に完全に収まっていること。
-
このエリア内には、柵、配管、ロボット本体、治具などの構造物が入らないこと。視野の遮蔽や点群の欠損の原因となる可能性があります。
重点チェック項目:
-
供給物の最大サイズ(積載高さを含む)が、カメラの有効撮影視野内に収まっているか。
-
余裕が十分に確保されているか(周囲150~200mm以上推奨)、供給位置のずれに対応可能か。
-
カメラの取り付け高さとワーキングディスタンスが適切か、距離が遠すぎて視野不足にならないか。
-
-
カメラの安全スキャン視野
カメラの安全スキャン視野は、直接的な撮影には影響しませんが、特定の用途では以下を確認する必要があります。
-
カメラブラケット自体がロボットの動作経路や把持位置姿勢を妨げないこと。
-
-
|
カメラは取り付け後に位置を調整できないため、カメラをブラケットに固定する前に、視野が作業領域全体をカバーしていることを必ず確認してください。 |
|
Mech-Mind が提供する 3Dカメラ 型番選定ツール と Mech-Viz を使用してシミュレーション検証を行うことをお勧めします。これにより、事前にカメラの視野が遮られる可能性のある問題を発見できます。 |
カメラの取り付け要件(ETHの場合)
カメラをロボット先端に取り付ける場合、以下のことに注意してください。
-
カメラブラケットの取り付け
カメラブラケットの取り付けは、取り付けボルトにスレッドロッカーを塗布したり、緩み止めワッシャーを使用したりするなど、緩みを防止する必要があります。
-
ケーブル固定方法
ケーブルの接続部近くをしっかりと固定し、カメラの接続部に力がかからないようにする必要があります。ケーブルを束ねる際には、ロボット先端のフランジの回転余裕を考慮し、ケーブルの引き出しが不足しないようにし、それによってカメラケーブルが引っ張られ、カメラケーブルの接続部に不可逆的な損傷が生じるのを避けるようにしてください。ケーブルの固定方法を下図に示します(1-カメラケーブル、2-ケーブル固定具、3-ケーブル接続部、4-L型変換アダプタ、5-カメラ本体)。

-
ケーブルの配線
ケーブルの方向を適切に配置し、ケーブル保護管内のケーブルが長すぎないか短すぎないようにします。下図は、ケーブルが長すぎる誤った例です。

-
ケーブルの保護
ケーブル保護管を使用する際に、以下の点に注意してください。
-
ケーブル保護管には、自動巻き取り式のケーブル保護管や布製のケーブルラップを使用しないでください。
-
ケーブル保護管には、標準の一式の波付管を選択してください(管固定ブラケット、クランプ、摩擦ボールなどが含まれますが、これに限定されません)。
-
ケーブル保護管およびケーブルは、それぞれ固定および組み立てを適切に行い、ロボットの動作中にケーブルに追加のトルクがかからないように注意してください。

-
-
カメラ視野の確認
-
カメラの有効撮影視野
カメラの有効撮影視野とは、カメラが完全な点群データを取得できる物理的な範囲を指します。以下を確認してください。
-
供給容器(コンテナ/パレット)および内部のワークが、この視野内に完全に収まっていること。
-
周囲には柵、配管、ロボット本体、治具などの構造物が入らないこと。視野の遮蔽や点群の欠損の原因となる可能性があります。
重点チェック項目:
-
供給物の最大サイズ(積載高さを含む)が、カメラの有効撮影視野内に収まっているか。
-
余裕が十分に確保されているか(周囲150~200mm以上推奨)、供給位置のずれに対応可能か。
-
カメラの取り付け高さとワーキングディスタンスが適切か、距離が遠すぎて視野不足にならないか。
-
-
カメラの安全スキャン視野
カメラの安全スキャン視野は、直接的な撮影には影響しませんが、特定の用途では以下を確認する必要があります。
-
ロボットの動作中、カメラが周囲の設備やワークに接触しないこと。
-
ハンドの開閉時に、カメラの死角や衝突リスクが発生しないこと。
-
-
|
カメラはロボットとともに移動するため、すべての撮影点で障害物がないことを確認してください。 |
|
Mech-Mind が提供する 3Dカメラ 型番選定ツール と Mech-Viz を使用してシミュレーション検証を行うことをお勧めします。これにより、事前にカメラの視野が遮られる可能性のある問題を発見できます。 |