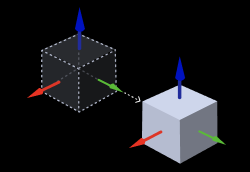
位置姿勢を指定方向に移動

パラメータ説明
可視化設定
- 選択された座標系で点群を表示
-
初期値:ロボット座標系
オプション:ロボット座標系、カメラ座標系
調整説明:詳細については、選択された座標系で点群を表示 をご参照ください。
- 位置姿勢表示の設定
-
初期値:出力位置姿勢のみを表示
オプション:入力位置姿勢のみを表示、出力位置姿勢のみを表示、入力と出力位置姿勢をすべて表示。
調整説明:詳細については、選択された座標系で点群を表示 をご参照ください。
並進方向の設定
- 移動距離
-
初期値:0
調整説明:実際の状況に応じて設定してください。
- 基準方向
-
初期値:CustomizedDirection
オプション:CustomizedDirection 、ObjectAxis
-
CustomizedDirection:カスタマイズした方向(X/Y/Zの値)に沿って並進します。基準方向は、移動対象の位置姿勢が属する座標系に基づきます。
-
ObjectAxis:対象物の指定した軸に沿って並進します。実際の状況に応じて、適切な 指定軸 を選択する必要があります。
調整説明:実際の状況に応じて設定してください。
-
調整例
-
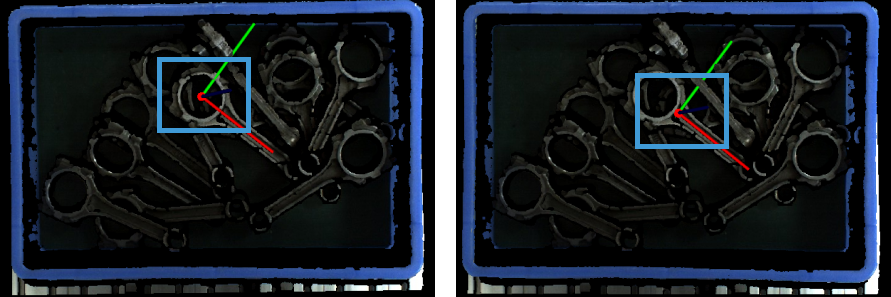
基準方向がObjectAxis、指定軸がX軸、並進距離がそれぞれ0と30mmの場合の位置姿勢並進効果は、下図のように示します。その中、左側の位置姿勢の並進距離は0で、右側は左側の位置姿勢をX軸に沿って30mm移動させた効果です。
-
基準方向がObjectAxis、指定軸がY軸、並進距離がそれぞれ0と30mmの場合の位置姿勢並進効果は、下図のように示します。その中、左側の位置姿勢の並進距離は0で、右側は左側の位置姿勢をY軸に沿って30mm移動させた効果です。

-
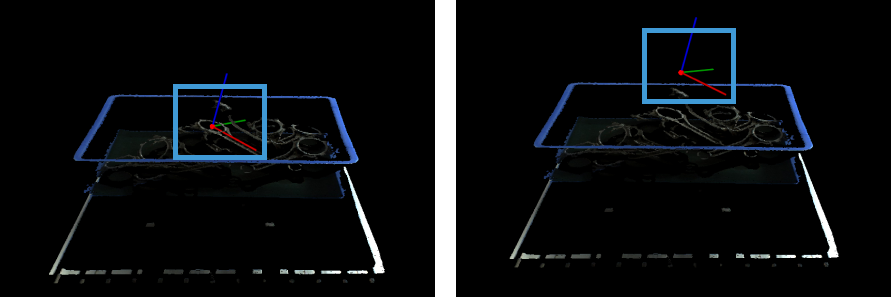
基準方向がObjectAxis、指定軸がZ軸、並進距離がそれぞれ0と80mmの場合の位置姿勢並進効果は、下図のように示します。その中、左側の位置姿勢の並進距離は0で、右側は左側の位置姿勢をZ軸に沿って80mm移動させた効果です。
-
基準方向がCustomizedDirectionの場合、カスタマイズの方向にX、Y、Z値を設定する必要があります。下図に示すように、原点OからA(X, Y, Z)に向こう方向が位置姿勢の並進方向となります。
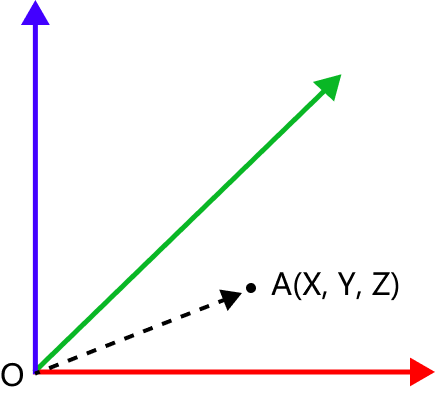
X、Y、Zをそれぞれ5に設定し、並進距離を80mmに設定した場合の位置姿勢並進効果は下図に示します。その中、左側は並進前の位置姿勢で、右側は左側に基づいてカスタマイズの方向に80mm並進した効果です。
