座標系
本節では、ロボットのビジョンや運動に関する座標系の基本概念と一般的なタイプについて説明します。これは、ロボットの運動計画、ビジョンによるガイド、およびワークの位置決めを理解するための基礎となります。
座標系は、物体の三次元空間における位置と姿勢を表すための参照用システムです。通常、3次元直交座標系を用いて物体の空間位置を表します。座標系はX軸、Y軸、Z軸という、互いに垂直に交わる3本の直線で構成されます。空間内の点の位置は座標 (x, y, z) によって表すことができます。
ワールド座標系
ワールド座標系は仮想空間全体の基準となる座標系です。Mech-Viz では、3次元仮想区間の中心を原点として定義され、空間内の全オブジェクトの位置姿勢を体系的に表すために用いられます。
ロボット座標系
ロボット座標系とは、メーカーによって定義されたロボットのベース座標系であり、ロボットフランジやエンドツールの位置を表すために用いられます。この座標系は通常、ロボットティーチペンダントのデフォルト座標系であり、ビジョンシステムの展開と経路計画の参照基準となります。
| ロボット座標系は、Mech-Viz におけるロボットツールの位置姿勢の基準座標系であり、ロボットが固定されている場合、ワールド座標系と一致します。 |
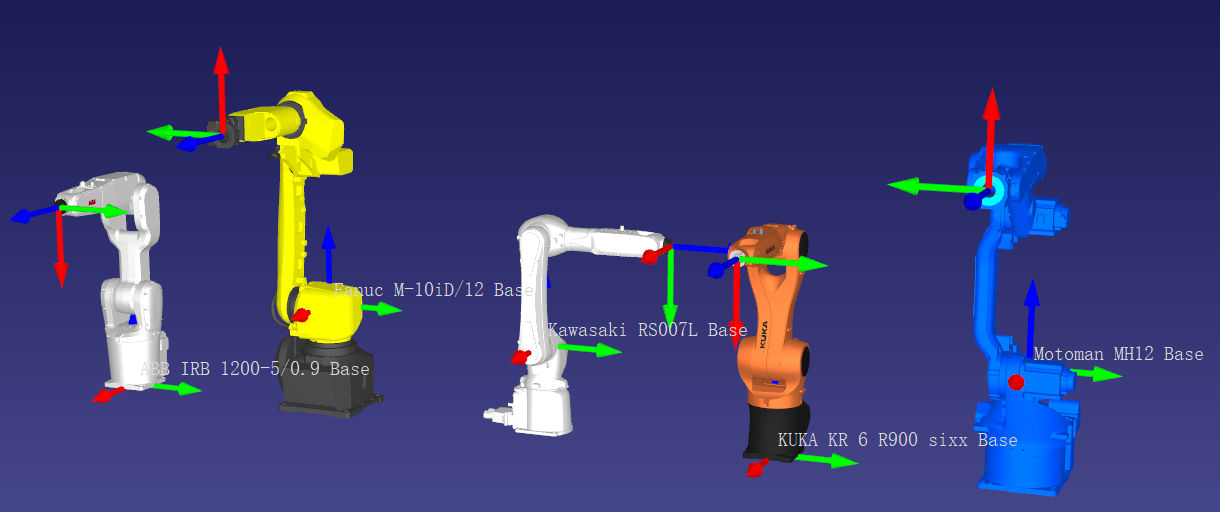
ロボット座標系の現点位置は各メーカーが独自に定義するため、メーカーによって異なります。以下に一部の主要メーカーの設定例を示します:
-
ABB:ロボットベースの下面
-
FANUC:第 2 軸の回転軸平面
-
KAWASAKI:R シリーズは第 2 軸の回転軸平面、その他の機種はベースの下面
-
KUKA:ロボットベースの下面
-
YASKAWA:第 2 軸の回転軸平面
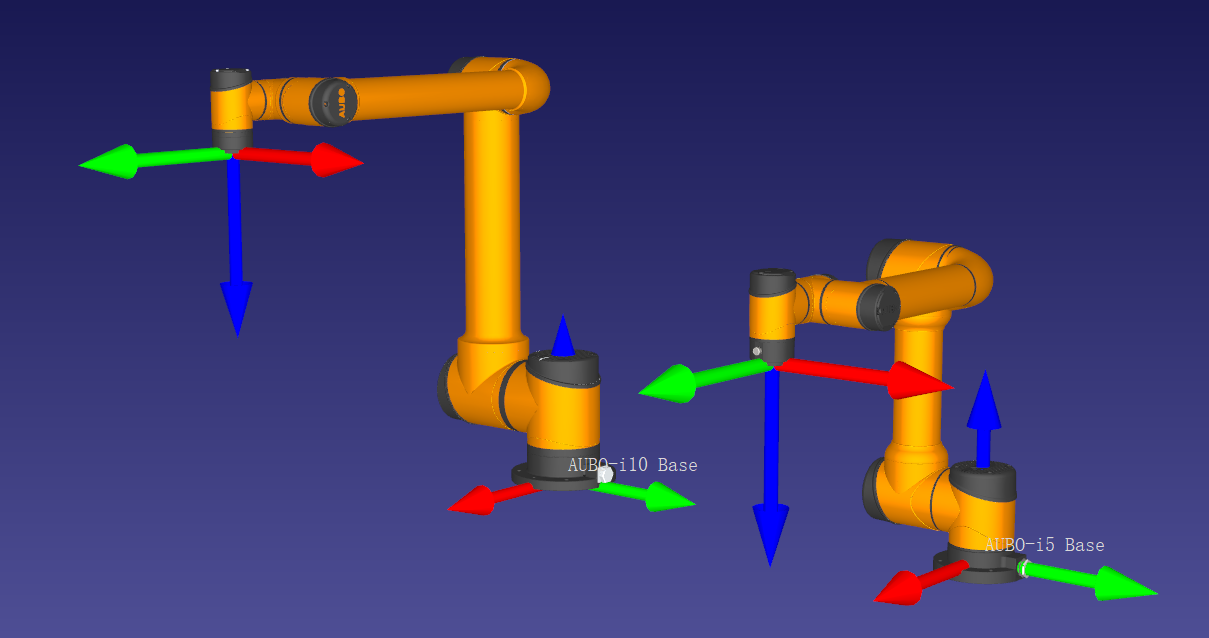
なお、一部の機種では、座標系の原点がベースの上方に位置します。例えば、AUBO i5 や一部の HAN’S ロボットでは、その座標系がベース上面から約 2 mm ~ 1 cmの位置に設定されています。
異なるメーカーのロボット座標系における軸方向にも差異があります。例:
-
ABB、FANUC、KUKA、YASKAWA: X軸(赤色の矢印)はロボットの前方を指す
-
KAWASAKI:Y軸(緑色の矢印)はロボットの前方を指す
| ビジョンシステムを配置する際には、ロボットコントローラで使用されている座標系(デフォルト/ユーザー定義)を事前に確認してください。各メーカーが座標系の設定に差異があるため、ロボットティーチペンダントに表示されるツール姿勢数値と、Mech-Viz 上の数値が一致しない場合があります。プロジェクト導入後、ツール位置姿勢を比較して差異が確認された場合は、Mech-Viz のリソースでロボット名を右クリックし、ロボットファイルディレクトリを開くを選択し、[robot]_algo.jsonファイル内の関連パラメータを修正してください。 |
カメラ座標系
カメラ座標系はカメラメーカーによって定義され、カメラの視野内にある物体がカメラに対して持つ位置と方向を表すために用いられます。この座標系は、カメラとロボット座標系間の空間関係を確立するための外部パラメータキャリブレーションによく使用され、ビジョンによるガイドと経路計画の基盤となります。
Mech-Mind産業用 3D カメラの座標系原点は通常、メイン 2D カメラの光学的中心の位置にあります。その座標系の軸方向は次のように定義されます:Z 軸はカメラの光軸と一致し、結像面に垂直で、被写体方向を指します。X 軸と Y 軸は結像面に平行で、その方向は右手の法則に準拠します。

対象物座標系
対象物座標系は対象物であるワークの基準座標系であり、ワークの空間における位置と方向を表すために用いられます。ロボット座標系やカメラ座標系とは異なり、対象物座標系は通常、把持・配置・対称性設定などの応用シーンに適応するため、ユーザーがワークの幾何学的特徴とタスク要件に基づいて原点位置を独自に定義します。
| Mech-Viz V1.8.0 以前のバージョンでは、対象物座標系の原点は通常、対象物の中心点(ジオセンター)によって定義されていました。 |
- (対象物)把持点(把持位置姿勢)
-
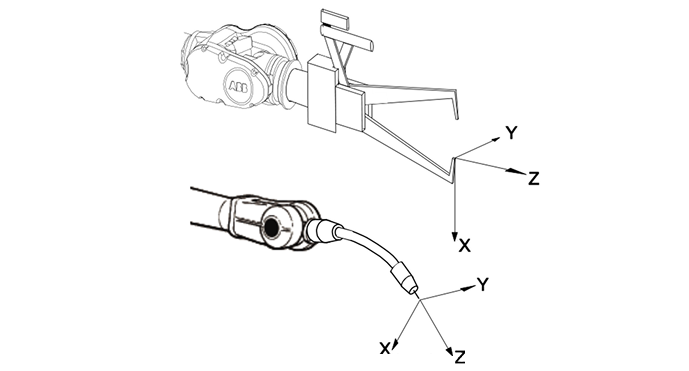
対象物座標系では、1つまたは複数の把持点を定義でき、把持点は Mech-Vision によって出力される。対象物を把持する時、ロボットは TCP を把持点に移動させ、両方の原点と X 軸を一致させ、 Y 軸と Z 軸の方向を逆転させます。
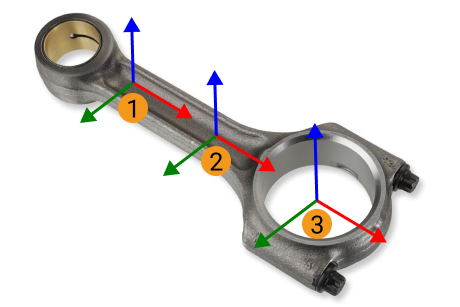
① と ②はシャフトの把持点、 ③ はリング中心の把持点です。
- 対象物位置姿勢による配置
-
Mech-Viz で対象物位置姿勢を用いて配置する際には、ロボットは対象物座標系を空間内に設定された目標点に合わせてから配置を行います。すなわち、対象物座標系は対象物位置姿勢による配置時の基準点ともなります。

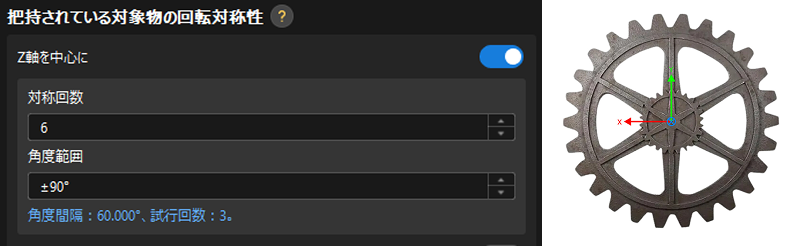
- 回転対称
-
ワークが回転対称性を持つ場合、その対称回転の中心は通常、対象物座標系の原点として設定されます。ユーザーはワーク座標系の任意の座標軸を回転軸として指定できます。例えば、60° ごとに対称性を持つ歯車の場合、その対称軸はワーク座標系の Z 軸となります。この設定により、回転対称の把持点を自動に生成できます。