位置姿勢
本節では、ロボットのビジョンや運動に関する位置姿勢の基本概念と一般的なタイプについて説明します。これは、ロボットのビジョン認識、経路計画、動作制御を完遂するための基礎となります。
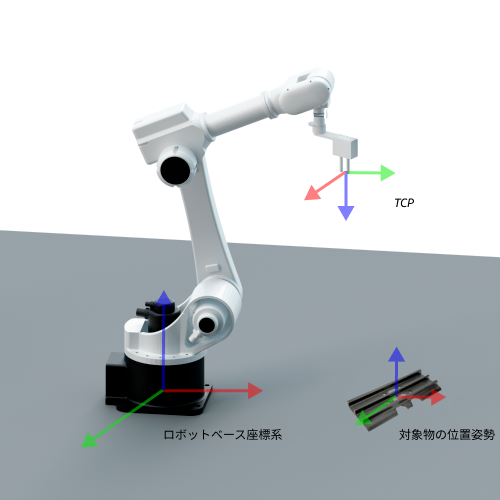
位置姿勢は位置と姿勢で構成され、空間における物体の位置と向きを表します。通常、座標系(ツール座標系、対象座標系など)が別の座標系(ロボット座標系、カメラ座標系など)に対する空間的な関係として表されます。姿勢は通常、6つの成分(X、Y、Z、Rx、Ry、Rz)で構成され、それぞれが空間位置と各座標軸周りの回転に対応します。
対象物位置姿勢
対象物のある点がロボット座標系に対する位置姿勢です。対象物を配置するのは、対象物の位置姿勢を目標位置姿勢と重なり合わせることです。
対象物位置姿勢は、ワーク認識と把持計画よく用いられます。ビジョンシステムがカメラ座標系におけるワーク姿勢を出力し、ハンド・アイ・キャリブレーションの結果に基づいてそれをロボット座標系における対象物位置姿勢に変換します。これにより、把持点や組立て位置の空間的位置を決定します。
ロボット位置姿勢
ロボット位置姿勢は、三次元空間におけるロボットの位置と方向を指します。通常はツール位置姿勢や関節角度で表されます。
ツール位置姿勢
ツール位置姿勢は、ロボット座標系に対するツール座標系の相対的な位置姿勢の記述であり、末端ツール(ロボットハンド)が空間内的な位置と姿勢を表すために用いられます。末端ツールの位置(x、y、z)と姿勢(通常、オイラー角、回転行列、または四元数で表現される)が含まれます。
ツール位置姿勢の基準点は TCP(ツールセンターポイント)、すなわちツール座標系の原点となります。TCPは、末端ツール上または外部に定義される基準点であり、空間におけるツールの位置と方向を表すため用いられます。その位置はロボットフランジの位置姿勢を基に定義され、通常はツールの重要位置(吸盤の中心、グリッパーの把持点、溶接ヘッドの先端など)に設定されます。ロボットがワーク把持、溶接、塗装などのタスクを実行する際、その動作の本質はTCPを目標点に移動させることです。
-
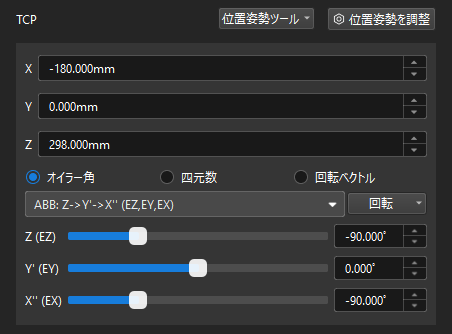
オイラー角
オイラー角(Euler Angles)は、物体が 3D空間における回転を表示します。
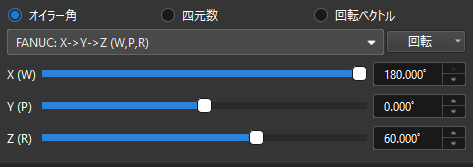
3つの角度で構成されており、それぞれ 3つの軸の回転に対応しています。3つの軸の回転は、対象物座標系の X、Y、Z 軸を中心とする回転です。 ロボットメーカーごとにオイラー角の表現方法は異なります。オイラー角とその表現方法については、より詳しい説明はオイラー角をご参照ください。


-
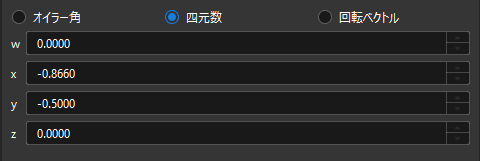
四元数
デッドロックを回避するために、一部のロボットメーカーは四元数を使用します。四元数は、3つの数値で空間の回転軸を定義し、1つの数値で回転角度を定義します。ロボットハンド座標系の初期状態からこの回転軸を中心にこの角度だけ回転させると目標姿勢に到達します。
-
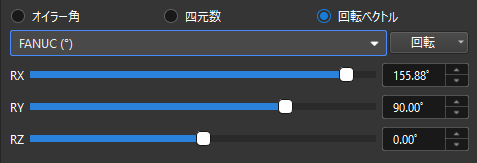
回転ベクトル
軸角度とも呼びます。ロボットハンドの回転を表現します。
UR ロボットが使用しています。
ツール位置姿勢は、経路計画と把持実行の核心的なパラメータです。経路節点、目標位置、または手動ティーチングにおいて、ユーザーが入力と調整するのはツール位置姿勢であり、ロボットはこの位置姿勢に基づいて直線運動または関節運動を実行し、把持、配置などのタスクを遂行します。
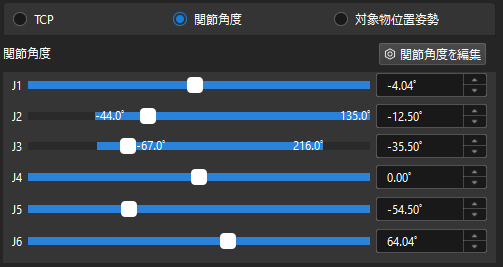
関節角度
ロボットの各関節が開始位置または基準位置に対する回転角度です。この表現方法はロボット関節の姿勢をより直観的に表現します。
関節角度は順運動学計算ツール位置姿勢にマッピングされ、ロボット位置姿勢は逆運動学計算によって関節角度にマッピングされます。
実際の応用では、関節角度は順運動学の計算、逆運動学解の検証およびロボット姿勢再現によく用いられます。オフラインシミュレーションでは、Mech-Viz は関節角度によって各時点でのロボット姿勢を判断します。制御通信において、ロボットが関節角度データの受信に対応している場合、Mech-Viz は計画結果の関節角度を直接送信することができ、これによりシミュレーションと完全に一致する運動経路を実現します。
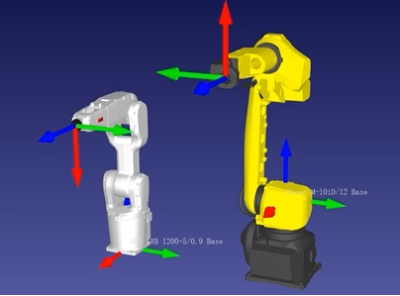
フランジ位置姿勢
ロボットフランジ座標系がロボット座標系における位置姿勢です。表現方法はツール位置姿勢とは同じです。ツール中心点(TCP)がフランジ中心点に位置し、回転のない特殊なツール位置姿勢と見せます。
ロボットメーカーによってフランジ座標系の初期向きは異なるのでフランジ位置姿勢の初期角度は異なります。例えば ABB ロボットの X 軸が下向きで 、対して FANUC ロボットは上向きです。また、ほとんどのロボットは、フランジ位置姿勢 Z 軸がフランジ表面に垂直で外向きですが Turing ロボットの X 軸が外向きです。
フランジ位置姿勢は主にハンド・アイ・キャリブレーション、ロボットハンドの取り付けおよび位置姿勢の検証に用いられます。ハンド・アイ・キャリブレーションでは、カメラ座標系におけるキャリブレーションボードの位置姿勢とフランジ位置姿勢を用いて外部パラメータ変換を計算します。また、ロボットハンドの交換やTCPオフセットの検証時にも、フランジ位置姿勢は基準としてよく用いられます。