ロボット運動学
本節では、ロボットの運動タイプ、順運動学と逆運動学、複数解の処理、および特異点回避戦略を含む、ロボット運動学の基本概念について説明します。運動学は、ロボットの経路計画、位置姿勢制御およびビジョンによるガイドを実現するための理論的基礎です。
順運動学と逆運動学
順運動学と逆運動学は互いにマッピング関係にあります。関節角度は順運動学計算によってツール位置姿勢にマッピングされ、ツール位置姿勢は逆運動学計算によって関節角度にマッピングされます。
順運動学
順運動学は、既知のロボット各関節角に基づいて、エンドツール(TCP)の空間位置姿勢を求めるプロセスです。各関節角度が既知の場合、ロボット構造公式(各リンクの長さ、関節のゼロ位置と回転方向などのパラメータを含む)に代入することで、唯一のツール位置姿勢を決定できます。
経路計画または動作制御において、システムが関節角度の形式でコマンドを送信する場合、ロボットは直接関節角度に従って動作を実行するため、運動結果は計画結果と完全に一致します。
逆運動学
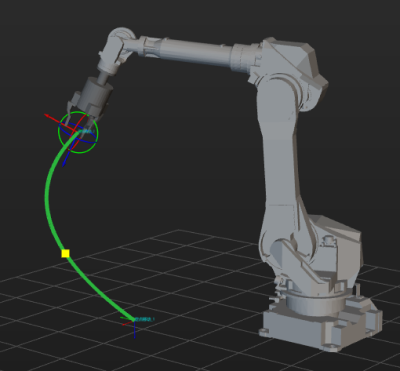
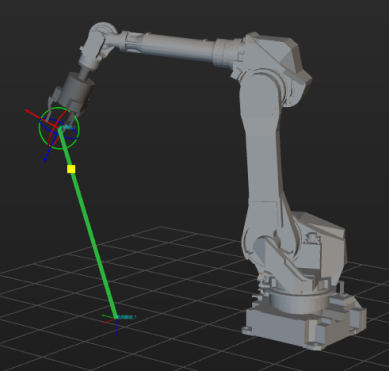
逆運動学は、既知のエンドツールの位置姿勢(目標点の位置と姿勢)に基づいて、ロボットの各関節角度を求めるプロセスです。既知量が未知量より少ないため、逆運動学には通常複数の解が存在し、異なる関節角度の組み合わせが同一のツール位置姿勢に対応する可能性があります。
![][width=500](_images/robot-basics/inverse-kinematics.png)
ツール位置姿勢を用いた通信または制御を行う場合、ロボットコントローラは自ら逆運動学について解く必要があるため、ロボットの実際の動作経路が Mech-Viz の計画結果と一致せず、動作偏差や衝突を引き起こす可能性があります。
とはいえ、実際の応用ではツール位置姿勢が幅広く使用されています。その主な理由は以下の通りです:
-
一部のロボットは、特定の通信インタフェースや制御モードにおいて関節角度形式のコマンドを直接受信できません。
-
一部のコントローラには補償アルゴリズムが搭載されており、ツール位置姿勢を使用することでより高い動作精度が得られます。
-
ツール姿勢は、後続のビジョンによるガイド、組立て、またはキャリブレーションなどのシナリオにおける二次変換と処理を施すのに適しています。
特異点
特異点とは、ロボットが特定の関節位置において、運動学方程式が解けなくなる、または自由度を失う状態を指します。この状態において、ロボットは特定方向への運動能力を失うか、または無限に増強され、制御不安定や動作異常を引き起こします。
特異点のタイプ
発生位置と原因に基づき、ロボットの特異点は通常、以下のタイプに分類されます:
-
手首特異点
手首の3つの回転軸が共線になると発生し、末端の姿勢が制御不能または急激な方向変化を引き起こします。例えば、6 軸ロボットにおいて第 5 軸角度が 0° または 180° の場合、手首特異点が発生する可能性があります。
-
肘特異点
前腕と上腕が同一直線上になると発生し、ロボットは「肘上」と「肘下」の姿勢を判定できなくなります。経路計画において複数解の切り替えや動作の急変を引き起こす可能性があります。
-
肩特異点
手首の中心が第 1 関節の軸線と一致するとき、または関節軸線に特定の共線関係が生じるときに発生します。これにより、末端の特定方向への動作自由度が制限され、関連関節の大幅な回転を引き起こす可能性があります。
実際の産業応用において最も一般的な特異点は、6 軸ロボットの第 4 軸と第 6 軸が同軸に近づいた状態で直線運動を行う場合に発生します。
特異点回避
6 軸ロボットは動作中に固有の特異点が存在します。特異点発生のリスクを低減するため、以下の解決策が有効です:
-
オフセットアームロボットの開発:ロボット構造の変更により、第 4 軸と第 6 軸の同軸配置を回避します。例:UR シリーズ、FANUC CRX シリーズ。
-
コントローラーコマンドの最適化:Movej(関節運動)をMovel(直線運動)に近似するコマンドを追加することにより、実行の実現性を向上させます。
-
経路計画の調整:Mech-Viz は特異点が発生する可能性のある経路に対して減速処理を実施し、経路の再計画を試みます。
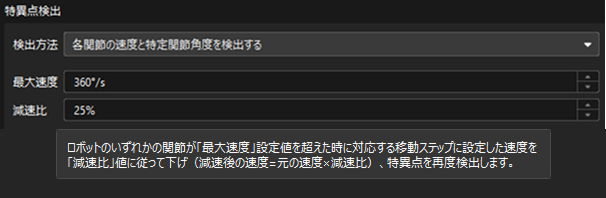
さらに、Mech-Viz は経路計画プロセスにおいて潜在的な特異点の自動検出機能があります。特異点検出の方法については、特異点検出をご参照ください。