点群の法線ベクトルを計算してフィルタリング
使用シーン
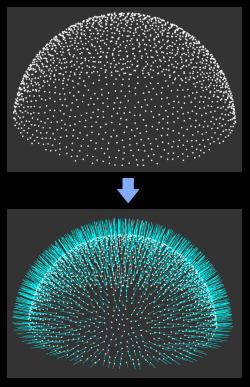
元の点群に法線情報を追加し、外れ値を除去します。通常は、カメラから画像を取得 や 深度画像を点群に変換 ステップの後に使用されます。
パラメータ説明
このステップでは、点群の法線ベクトル計算およびフィルタリング方法として、以下の 3 種類を提供します。
-
CloudPreprocessingGPU:点群の法線ベクトルを計算し、通常の点群を法線ベクトル付きの点群に変換します。IPC に GPU が搭載されており、法線ベクトル情報が必要な場合に推奨されます。
-
CloudXYZToCloudNormal:点群の法線ベクトルは計算せず、通常の点群を高速に法線ベクトル付きの点群へ変換します。
-
NormalEstimation:一般的な方法です。点群の法線ベクトルを計算し、通常の点群を法線ベクトル付きの点群に変換します。IPC に GPU が搭載されていないが、法線ベクトル情報が必要な場合に推奨されます。
以下では、それぞれの方法に関連するパラメータを説明します。
| パラメータ | 説明 |
|---|---|
有効点の最小深度 |
パラメータ説明:点群中の点の最小深度値を設定します。深度値がこの値未満の点は除去されます。 |
CloudPreprocessingGPU
計算設定
| パラメータ | 説明 |
|---|---|
バッチ処理 |
パラメータ説明:GPU 計算時に、大きな点群を複数のバッチに分けて処理し、一度に読み込むデータ量を削減します。
|
法線ベクトルを計算するときの半径 |
パラメータ説明:指定した半径内の点を用いて法線ベクトルを計算します。単位はミリメートル(mm)です。半径を大きくすると法線ベクトルは滑らかになりますが、細部が失われる可能性があります。半径を小さくすると細部は保持されますが、ノイズの影響を受けやすくなります。
|