通过相机采集图像生成模板点云 + 通过添加位姿来添加抓取点
通过相机采集图像生成模板点云
调整相机参数
-
启动 Mech-Eye Viewer 并连接相机;
-
单击
 进行一次图像采集;
进行一次图像采集; -
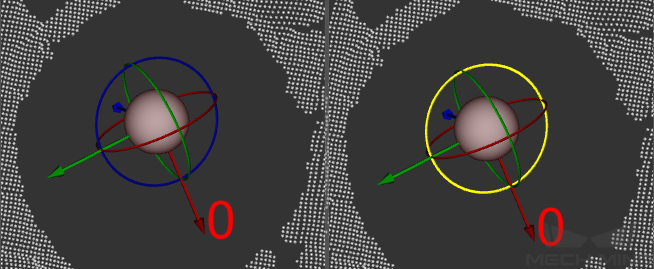
单击点云查看点云效果。
√

×

工件位于相机视野外。此时需将工件放置在相机视野内。
×

曝光时间参数设置过低。此时需增加3D参数中的曝光时间。
×

曝光时间参数设置过高。此时需降低3D参数中的曝光时间。
×

工件点云信息不完整。尝试微调3D参数中的曝光时间。
-
重复采集直到获得质量较高的点云。
采集点云
采集点云
-
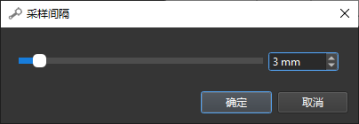
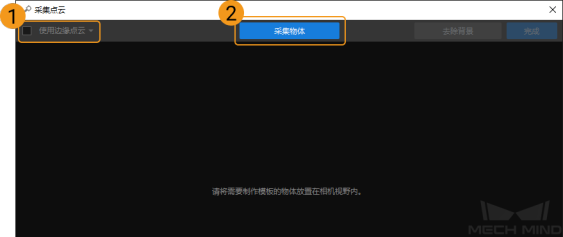
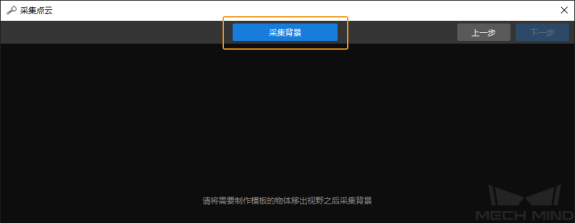
单击界面中的采集点云,在弹出的窗口中单击采集点云。

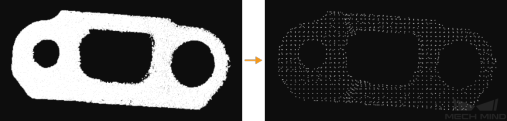
当目标物体较为扁平,但在相机下呈现清晰固定的边缘特征时(如面板、履带板、连杆、刹车盘等),建议使用边缘模板,即勾选“使用边缘点云”。当目标物体表面起伏特征较多时(如曲轴、转子、钢棒等),建议使用面模板。
本例中使用的链轨节工件表面特征较多,所以推荐制作该工件的面模板点云,即取消勾选使用边缘点云。然后单击采集物体,采集目标物体的深度图。
-
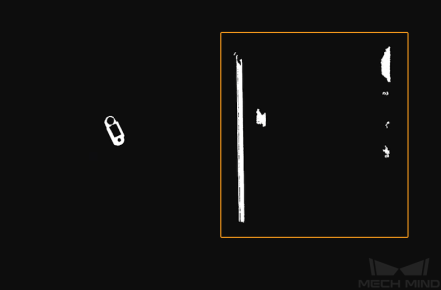
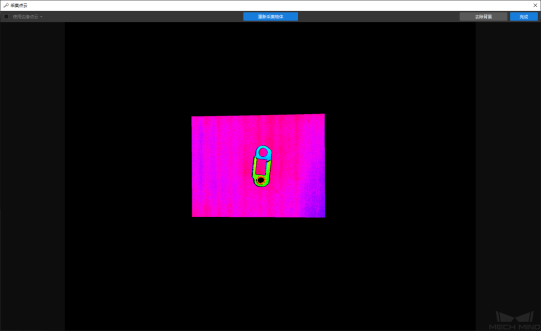
采集完成后,目标物体和背景的深度图如下图所示。
-
在界面右上角单击去除背景。
-
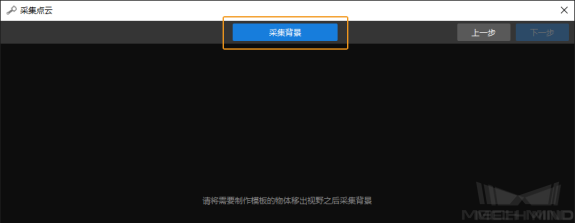
然后将物体移出相机视野,再单击采集背景来采集背景。
-
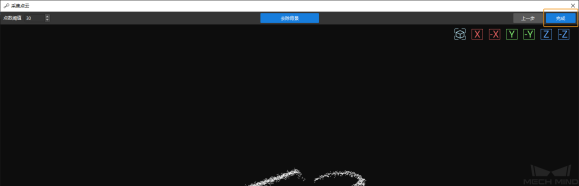
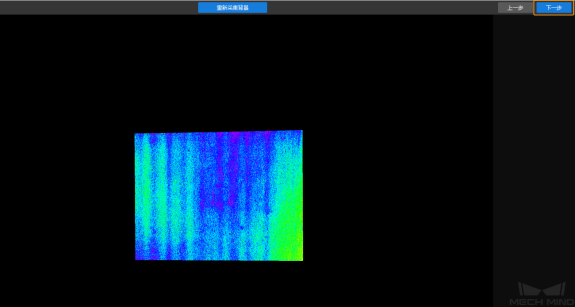
采集背景完成后,如下图所示。然后单击右上角的[下一步]。
-
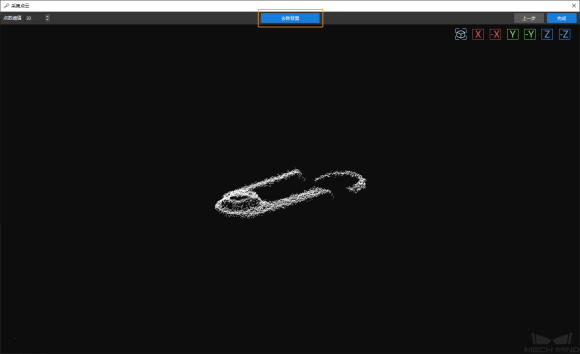
在该窗口中单击去除背景,即可得到去除背景后的物体,如下图所示。
-
单击右上角的完成,即可将去除背景后的物体导入匹配模板与抓取点编辑器。