ビジョンソリューションの設計
導入前に、プロジェクトの実際の要件に基づいてビジョンソリューションを設計し、カメラ型番、IPC型番、カメラの取り付け方式、およびロボットの通信方法などを確定する必要があります。これらの項目を確定することで、3Dビジョンシステムによるアプリケーションの迅速な導入が可能となります。
この段階では、以下のことを完了させてください。
カメラと付属品を選択
Mech-Eye 産業用 3Dカメラは、Mech-Mindが独自に開発した高性能な産業用 3Dカメラです。多種多様なワークに対し、高精度な点群データの生成が可能です。Mech-Mind は様々なカメラ型番を提供し、カメラごとに外乱光耐性/小型/ミクロン単位の高精度といった特徴があり、豊富な製品ラインナップで様々なニーズに対応します。
-
実際のプロジェクトでは、カメラのワーキングディスタンス、視野、および精度の要件に基づいて、適切な型番を選択してください。
カメラ型番を選択する際には、以下のことが参考になります。
-
3Dカメラ型番選択ツール を使用して、対象物の寸法に応じて適切な型番を選択します。
-
複数の型番が要件を満たす場合、カメラの特徴、利用シーン および精度要件に基づいて、最適な型番を選択してください。サポートが必要な場合は、Mech-Mind 株式会社の営業担当やプリセールスにお問い合わせください。
-
-
カメラ型番を選択するだけでなく、実際のプロジェクトの要件に応じて、電源モジュール、カメラのLANケーブル、キャリブレーションボードなどの付属品も選択する必要があります。詳細については、カメラ付属品の選択 をご参照ください。
カメラの取り付け方式を選択
カメラの一般的な取り付け方式には Eye to Hand(ETH) と Eye in Hand(EIH) の2種類があります。カメラとロボットの相対位置や全体のサイクルタイム要求に応じて選択できます。2種類の取り付け方式の特徴・利点および具体的な要件については、カメラの取り付け要件 をご参照ください。
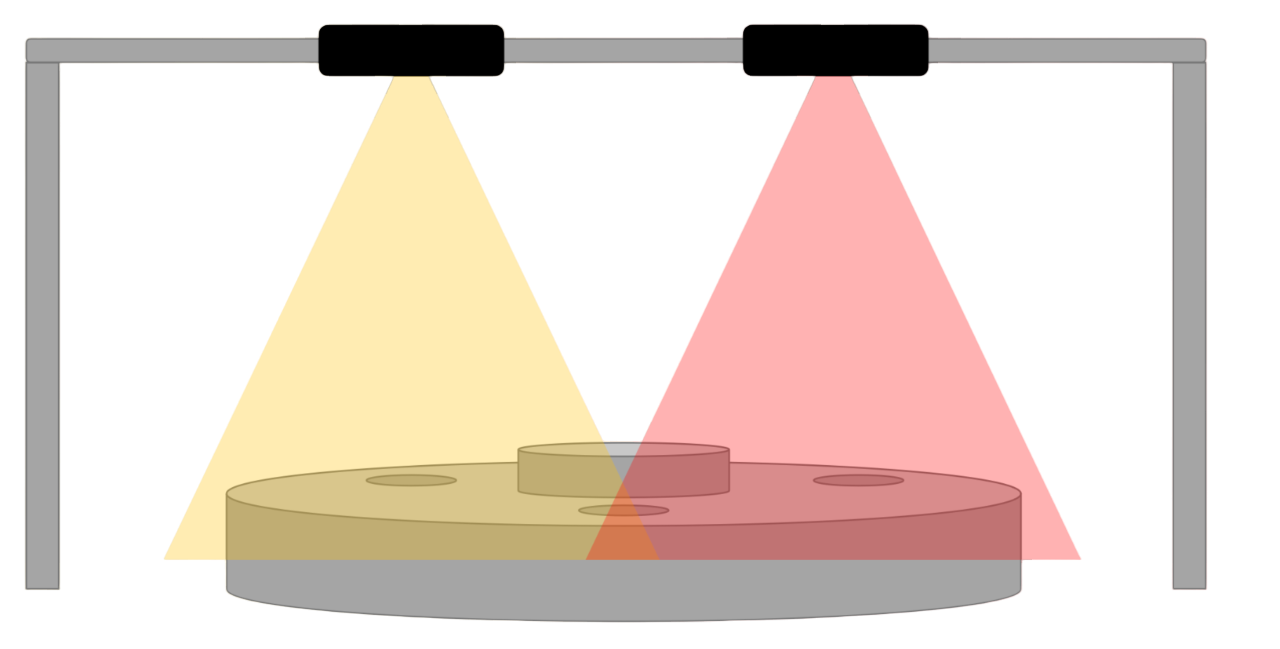
また、カメラの視野を拡大し、重複した視野の点群の品質を向上させるために、プロジェクトでは複数のカメラを取り付けることがあります。これは「Eye to eye(ETE)」取り付け方式と呼ばれます。
どのカメラ取り付け方式を選択するにしても、取り付けにはカメラブラケットを使用します。カメラブラケットの設計に関する詳細な情報は、カメラ取り付けブラケットの設計 をご参照ください。
IPC型番を選択
Mech-MindのIPCは、Mech-Mind ソフトウェアが必要とする標準的な実行環境を提供し、ソフトウェアの機能と性能を最適化できます。
IPCの 適用シーンや技術仕様 に基づいて、IPC型番を選択してください。詳細は下表の通りです。
| 技術仕様 | 適用シーン | Mech-Mind IPC STD | Mech-Mind IPC ADV |
|---|---|---|---|
同時に実行可能な Mech-Vision プロジェクト数 |
標準インターフェース/Adapter通信(経路計画ステップなし) |
≤5 |
≤5 |
標準インターフェース/Adapter通信(経路計画ステップあり) |
≤5 |
≤5 |
|
Vizティーチング通信(Mech-Vizソフトウェアを使用) |
≤5 |
≤5 |
|
3Dビジョンソリューション(3Dマッチングを使用) |
≤5 |
≤5 |
|
3Dビジョンソリューション(3Dマッチングおよび2Dディープラーニングを使用) |
≤2 |
≤2 |
|
1つのソリューションで接続可能なカメラの数 |
≤2 |
≤2 |
|
1つのソリューションで読み込み可能なディープラーニングモデルの数 |
≤5(CPU) |
≤5(GPU) |
|
1つのソリューションで接続可能なロボットの数(Vizティーチング通信) |
1 |
1 |
|
1つのソリューションで同時に有効化できる通信方式の数 |
1 |
1 |
|
1つのソリューションで同時に接続可能なクライアントの数(標準インターフェース/Adapter通信) |
≤4 |
≤4 |
|
自分で用意したデバイス(PCまたはノートパソコン)をIPCとして使用する場合、自分で用意したIPCの設定 を参照してそれがシステムの構成要件を満たしていることを確認し、関連する設定を完了してください。
ロボットとロボットフランジを選択
ロボットの選定時には、ロボットの可搬質量、ロボットの可達範囲、通信方式などの要素を考慮する必要があります。詳細については、ロボット型番を選択 をご参照ください。
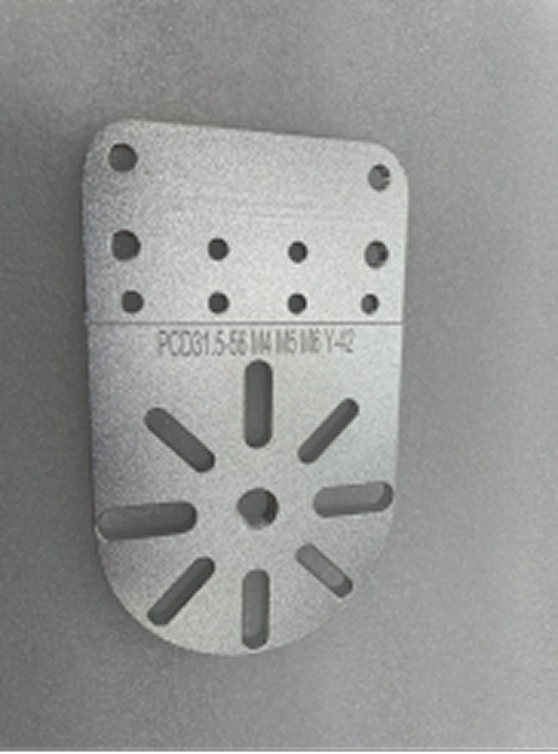
ロボットフランジとは、ロボットアームの先端に取り付けられる「標準インターフェース」であり、さまざまなツールや機器を接続するために使用されます。3Dビジョンソリューションにおいて、キャリブレーションボードをロボット先端に取り付けやすくするために、Mech-Mindは以下の仕様・型番のロボットフランジを提供しています。実際のロボットのフランジ寸法に合わせて、適切なフランジ接続部品を選定してください。
| 説明図 | 型番 | 寸法(mm) |
|---|---|---|
|
RF-S:ロボットフランジ(小) |
106 x 64 x 5 |
|
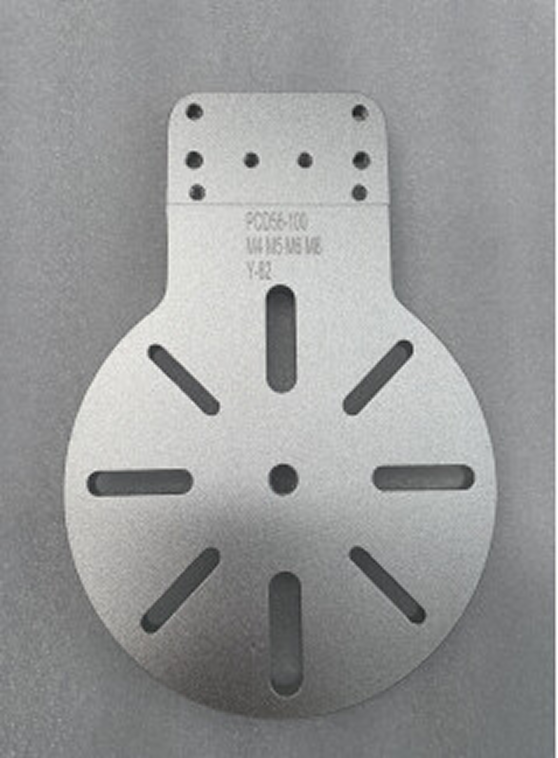
RF-M:ロボットフランジ(中) |
174 x 120 x 8 |

|
RF-L:ロボットフランジ(大) |
296 x 240 x 8 |
ロボットの通信方式を選択
通常、インターフェース通信は生産ライン上の実際のアプリケーションに適しており、より柔軟な機能と高速な把持タクトタイムを実現できます。一方で、Vizティーチング通信は通常、把持効果を迅速に検証するためにプロジェクトのテスト段階で使用されます。
| インターフェース通信方式を選択し、Mech-Vizを使用して計画された経路を取得 する必要がある場合は、Mech-Vizソフトウェアライセンスを取得する必要があります。 |
ディープラーニングを使用するかどうかを確認
ディープラーニングソリューションを選択 を参照して、ビジョンソリューションにディープラーニングが必要であるかどうかを確認してください。
| ビジョンソリューションでディープラーニングを用いた認識が必要な場合、Mech-DLK ソフトウェアのライセンスを取得する必要があります。 |
ビジョン認識のプロセスでは、3Dマッチングだけでは以下の問題を解決できない場合、ディープラーニングの使用が必要になります。
| 番号 | 従来の方法における課題 | 説明図 |
|---|---|---|
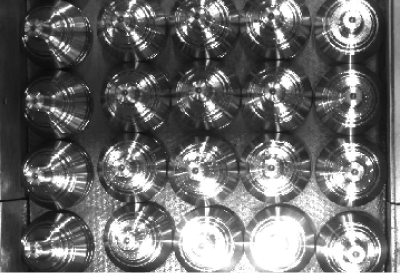
1 |
ワーク表面に高い反射性があり、点群品質が低い場合。 |
|
2 |
ワーク点群に幾何学的特徴が少なく、特徴点群の数も少ない場合。 |
|
3 |
ワークが整列して並べられ、かつ密集している状態で、個々のワーク点群を認識しにくい、または誤認識される場合。 |
|
4 |
ワーク特徴がカラー画像にのみ存在し、ワーク点群に特徴がない場合。 |
|
5 |
ビジョンタクトタイムに高い要件が求められているプロジェクトの場合。例えば、ワーク数が多い場合、点群モデルのマッチングに時間がかかります。この場合、ディープラーニングを使用してまず一部のワークを選出し、その後マッチングを実行することで、マッチングに必要な時間を短縮できます。 |
|



プロジェクトの精度要件を確認
ビジョンソリューションを設計する際には、プロジェクトの精度要件(例えば±3mm)を確認し、それに基づいてアプリケーション精度の期待値と目標を決定する必要があります。通常、±3~5mmの把持精度は一般的なプロジェクトの精度要件を満たすことができます。
高精度が求められる場合(例えば±1mm)、ドリフト自動補正 ソリューションの導入を推奨します。これにより、カメラの温度ドリフトによる精度誤差を低減できるだけでなく、3Dビジョンシステムの信頼性と安定性を確保できます。
ソフトウェアライセンスの形式、および必要な製品と機能ライセンスを確認
Mech-MindではSentinel LDKをソフトウェアライセンスシステムとして採用しています。このライセンスシステムは、ソフトウェアライセンス装置とソフトウェアライセンスコードの2種類の暗号化形式をサポートしています。使用するライセンス形式については、Mech-Mindまでお問い合わせください。
ビジョンソリューションが正常に動作することを確保するために、取得したソフトウェアライセンス装置またはソフトウェアライセンスコードには、対応する製品や機能のライセンスが含まれている必要があります。
| 製品/機能ライセンス | 説明 |
|---|---|
Mech-Vision 2.0+ |
必須製品ライセンス。Mech-Vision 2.0+ソフトウェアを実行する際に、このライセンスを取得する必要があります。 |
Mech-Viz 2.0+ |
オプションの製品ライセンス。インターフェース通信方式を選択し、Mech-Vizを使用して計画された経路を取得 する場合、このライセンスを取得する必要があります。 |
作業環境の要件を確認
ビジョンソリューションを設計する際には、各ハードウェアが適切な環境条件下で動作することを確保することが重要です。これはシステムの性能に影響を与えるだけでなく、ハードウェアの寿命や信頼性にも直接関係します。
ビジョンシステムを設置および使用する前に、以下を含む各ハードウェアの環境条件に関する具体的な要件を十分に確認してください。
-
環境温度
ハードウェア機器(主にカメラとIPC)の動作温度範囲を確認し、その範囲内で正常に動作できることを保証します。必要に応じて、エアコン、ヒーターまたは断熱材を使用して環境温度を調整します。
-
環境湿度
ハードウェア機器(主にカメラとIPC)の動作湿度範囲を確認します。高湿度による結露、腐食、短絡などを防止します。
-
耐振動性
Mech-Mind 3Dカメラの振動耐性および衝撃耐性は、この基準を満たしています。詳細については、カメラの技術仕様 をご参照ください。
ビジョンシステムの作業環境における振動強度が、上記の基準を超えないようにしてください。長時間にわたり範囲を超える振動を受けると、カメラの性能が低下する可能性があります。大幅に範囲を超える振動は、カメラの破損や生産ラインの停止を引き起こす可能性があります。このような状況において、Mech-Mindは一切の責任を負いません。
-
粉塵および汚染物質対策
Mech-Mind カメラは高い保護等級を備えており、ほこりや粒子状物質の機器内部への侵入を効果的に防ぎます。
画像取得品質を確保するために、カメラボディおよびレンズ を定期的に清掃してください。
-
電磁干渉対策
装置の設置場所は、強い電磁干渉源(大型モーターや無線通信機器など)から十分に離してください。これにより、フレーム落ちや深度画像の欠損、その他のデータ取得異常などの問題を回避できます。