特集:3Dマッチングに関するよくある問題と解決法
以下では、点群モデルの法線ベクトル異常によるマッチング問題と、点群モデルとマッチング対象の点群が異なる座標系に存在することによるマッチング問題の対処方法について説明します。
点群モデルの法線ベクトル異常によるマッチング問題
Mech-Vision 2.0.0バージョン以降、マッチングプロセスでは点群モデルの法線ベクトルに対する要求がより厳しくなり、法線ベクトルに異常があるとマッチングが失敗し、結果が得られなくなる可能性があります。以下に、2種類の法線ベクトル異常とその対処方法を紹介します。
STLモデルによる点群モデル作成時の法線ベクトル異常
-
問題
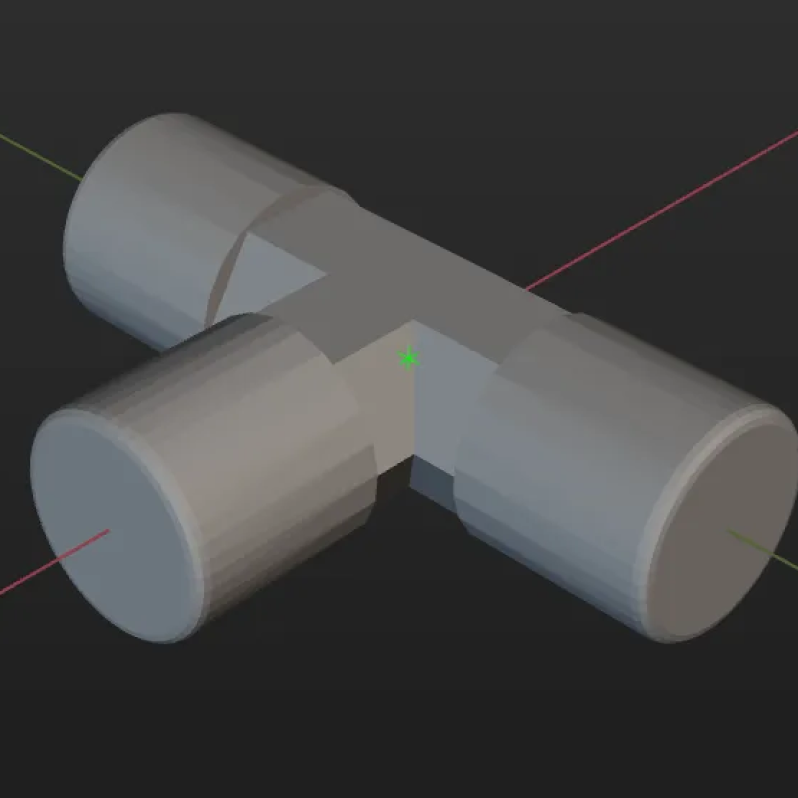
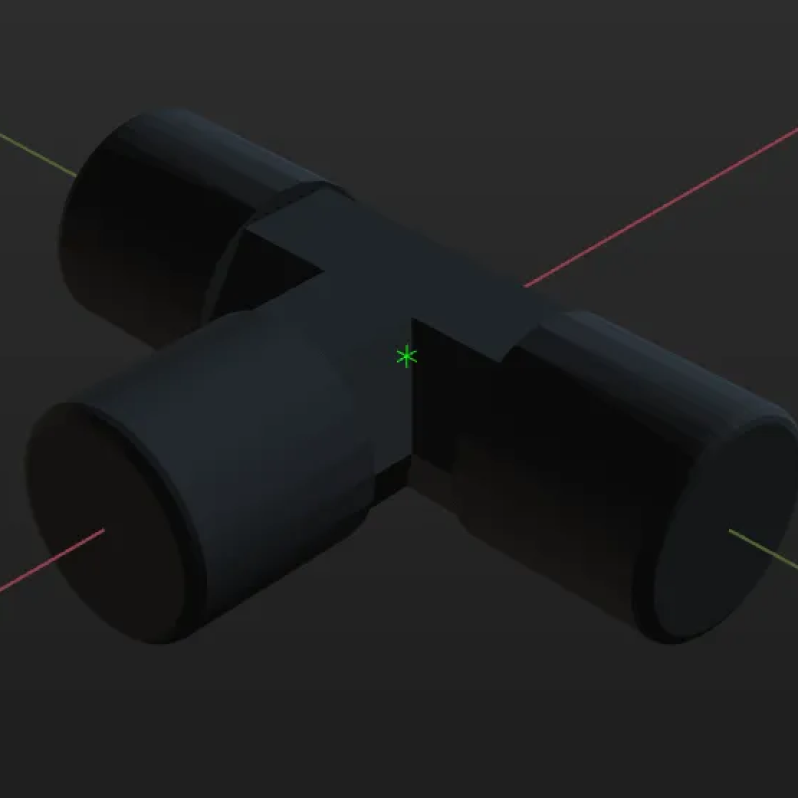
STLモデルをワークライブラリにインポートした後、モデルの一部が黒く表示されることがあります。通常、これはその部分の法線ベクトルが異常であることを示しています。正常な場合、モデルは均等なレンダリング効果を示すべきです。
下表に、法線ベクトルが正常と異常なモデルの例を示します。
正常 異常 

-
解決法
STLモデルの法線ベクトルに異常がある場合、「STLモデルの法線ベクトル修正ツール」を使用してSTLモデルを修正できます。
「STLモデルの法線ベクトル修正ツール」のダウンロードおよび使用方法については、STLモデルの修正に関する資料 をご参照ください。
点群モデルとマッチング対象の点群が異なる座標系に存在することによるマッチング問題
「3Dマッチング」ステップを使用する際には、点群モデルとしてカメラ座標系での点群を使用することを推奨します。また、「3Dマッチング」ステップに入力されるマッチング対象の点群が、点群モデルと同じ座標系であることを確認してください。
点群モデルの座標系とマッチング対象の点群の座標系が一致しない場合、マッチング結果が得られないか、誤マッチングが発生する可能性があります。
重なり除去機能によって正しいマッチング結果が誤って除去される
重なり除去機能を有効にすると、カメラ座標系内のワーク点群が、その上方にある他の点群と重なり比率がしきい値を超えた場合、重なっているワークの位置姿勢が除去されます。
しかし、正しいマッチング結果も除去される可能性があります。詳細は以下の通りです。
-
問題
「3Dマッチング」ステップで重なり除去機能を有効にした後、正しいマッチング結果が除去されます。
-
考えられる原因
ワーク点群がカメラ座標系にあり、マッチング対象の点群がロボット座標系にある場合、複数の高精度マッチング結果があり、正しい結果がフィルタリングされることがあります。
-
解決法
マッチング処理中に、「3Dマッチング」ステップに入力される点群が点群モデルと同じ座標系にあることを確認してください。
「角度しきい値」の調整後にマッチングエラーやマッチング結果なしが発生する
STLモデルを使用して点群モデルを生成しマッチングを行う場合、「3Dマッチング」ステップの パラメータを調整することで、点群モデルの不可視部分を除去し、マッチング速度と精度を向上させることができます。パラメータ調整レベルが「上級」に設定されている場合に表示されます。
しかし、「角度しきい値」を調整すると、マッチングエラーやマッチング結果が得られない場合があります。詳細は以下の通りです。
-
問題
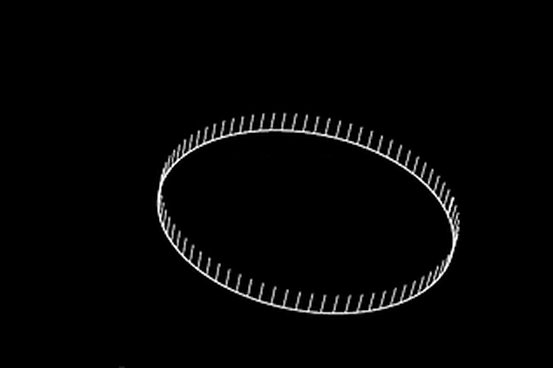
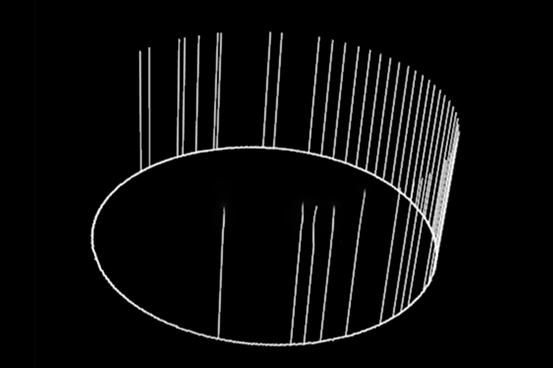
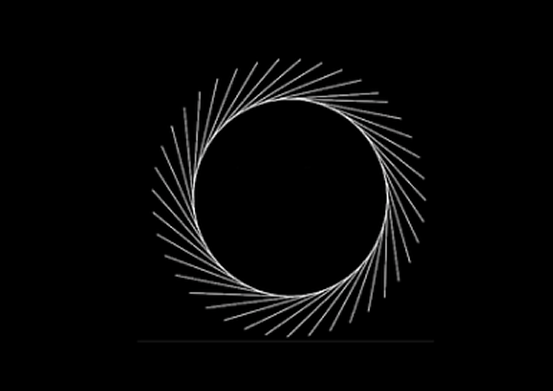
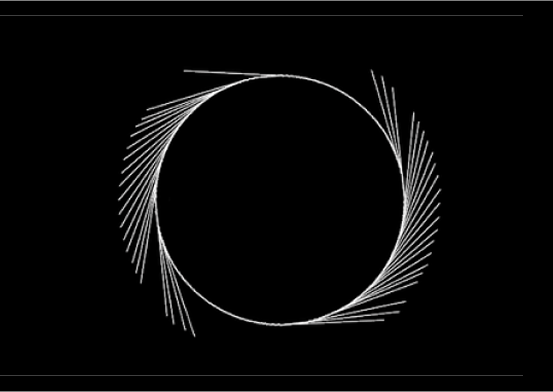
「角度しきい値」を180°に設定した場合、正常にマッチングできます。しかし、「角度しきい値」を調整すると、マッチング結果が調整前と大きく異なり、誤ったマッチング結果になる、またはマッチングできなくなります。
「角度しきい値」が 180°の場合 「角度しきい値」が 135°の場合 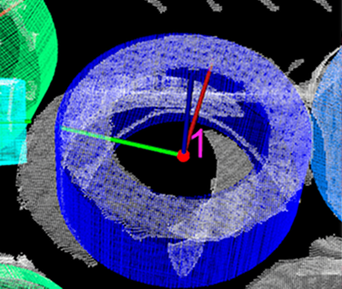
-
考えられる原因
点群モデルとワークの点群の座標系が一致しません。
-
解決法
マッチング処理中に、「3Dマッチング」ステップに入力される点群が点群モデルと同じ座標系にあることを確認してください。
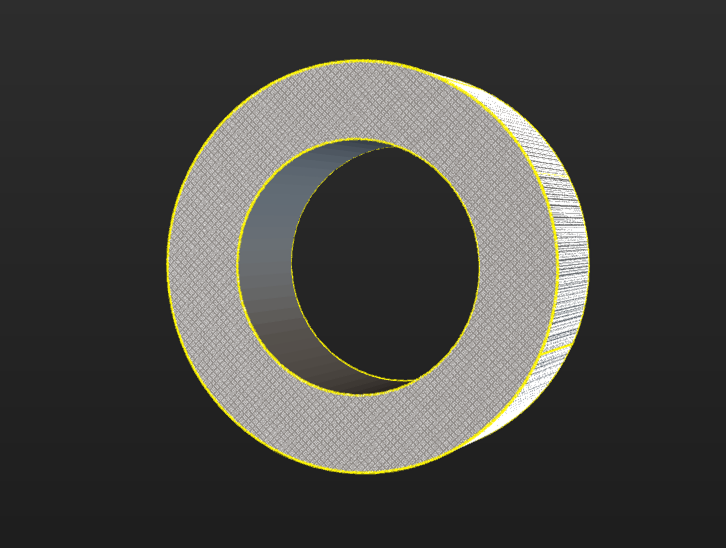
円形リングのSTLモデルの内壁点群欠落によるマッチング問題
-
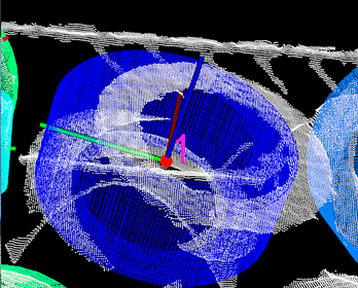
問題
Mech-Vision 2.xを使用して円形リングのSTLモデルを基に点群モデルを生成した後、円形リングの内壁点群が欠落し、マッチング結果の信頼度が低下することがあります。
-
解決法
この問題はMech-Vision 1.8 バージョンには存在しません。Mech-Vision 2.1.2 バージョンでは、ワークライブラリを使用してSTLモデルの 完全なサーフェス点群を生成 できます。