ロボットの絶対精度が低下していないかをチェック
以下では、ロボットの絶対精度が低下していないかをチェックするための方法を説明します。
Mech-Visionには、ロボット絶対精度チェックツールが組み込まれています。これにより、ロボットの絶対精度の問題を素早く特定し、解決することができます。
メニューバーから を選択し、誤差分析 画面で を選択します。
ロボットの原点をチェック
チェック方法:
ロボットを標準の原点姿勢にリセットする際には、各軸の目盛線がずれていないかを確認します。
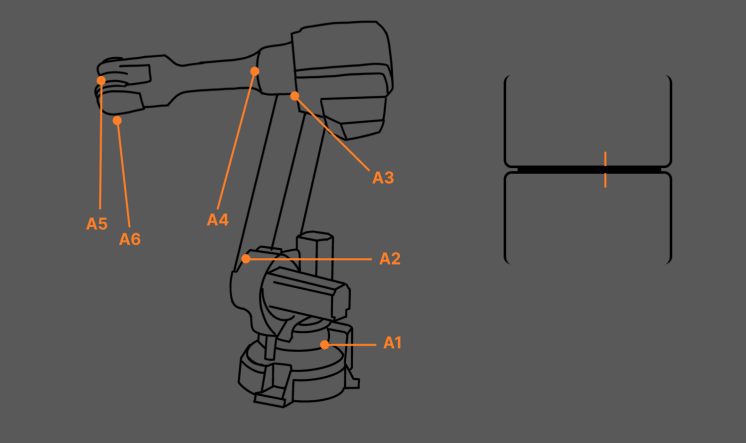
チェック基準:
-
目盛線に大きなずれがない場合、ティーチペンダントに表示される値が工場出荷値と一致しているかどうかを確認できます。
-
目盛線が明らかにずれている場合、ロボットの原点ずれが発生し、キャリブレーションを再実行する必要があります。
原点キャリブレーション:
ロボットの取扱説明書を参照して操作するか、サポートを受けるためにロボットメーカーにお問い合わせください。
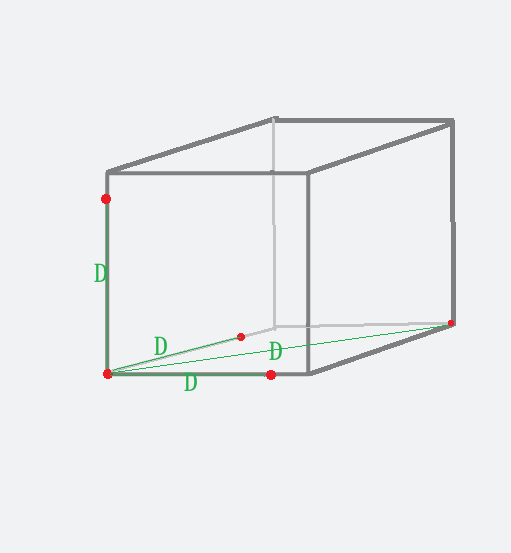
移動距離の誤差が大きくなっていないかをチェック
ティーチペンダントを使用して、ロボットを稼働空間内の固定方向(例えばX方向やY方向)に沿って一定距離を移動させ、移動後に実際の移動距離と比較して差を測定します。
チェック方法:
-
XYZ軸と対角線上にそれぞれ2点を選択し、ティーチペンダントからロボットの移動距離Dを読み取り、物差しで測定した移動距離D’と比較して差を測定します。
-
上記の方法でXYZの各方向と異なる位置で測定することを推奨します。
チェック基準:
全体の差が小さいほど、移動距離の誤差が小さく、ロボットの絶対精度が高くなります。
移動距離の誤差値をアプリケーション導入段階で記録された移動距離の誤差値と比較します。
-
誤差値が明らかに大きくなっていない場合、ロボットの絶対精度が使用可能です。その後、「ロボットの把持ずれ」問題のトラブルシューティング手順 に従ってトラブルシューティングしてください。
-
誤差値が明らかに大きくなっている場合、ロボットの絶対精度が低下していることを示します。この場合、ロボットの絶対精度の再キャリブレーションが必要なので、ロボットメーカーにお問い合わせください。
ロボットのTCP精度をチェック
チェック方法:
精度誤差分析ツール を使用してTCP精度を検証します。
操作方法を下図に示します。

チェック基準:
-
ロボットのフランジの先端が他の先端と重なる場合はTCP精度が良いことを示します。
-
大きなずれがある場合、TCP精度が低いであることを示します。この場合、TCPキャリブレーションが必要なので、ロボットメーカーにお問い合わせください。