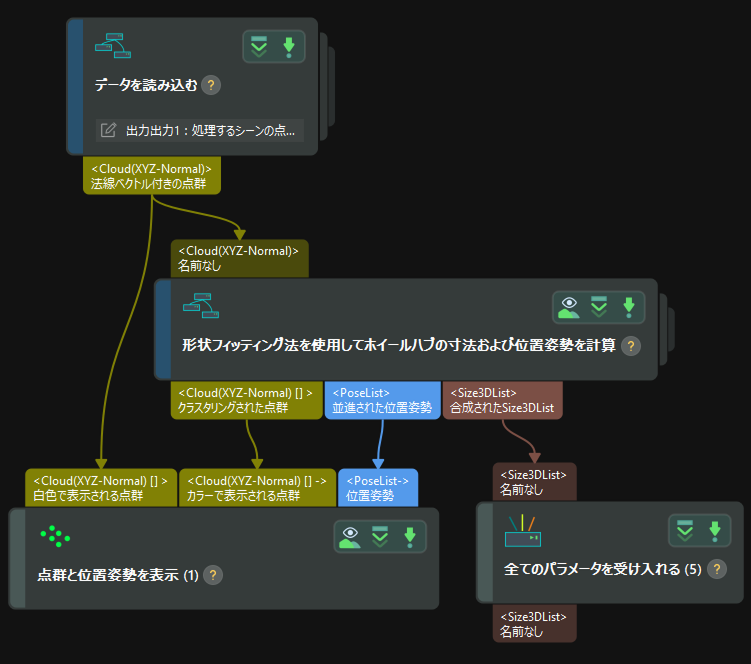
形状フィッティング法を使用してホイールハブの寸法および位置姿勢を計算
本ガイドでは、ワークの位置決めおよび組立シーンにおいて、ホイールハブの寸法および位置姿勢を正確に計算する方法を紹介します。「形状フィッティング法を使用してホイールハブの寸法および位置姿勢を計算」のサンプルプロジェクトを例に、関連するステップのパラメータ調整方法について説明します。
|
このプロジェクトには、インライン測定および2D測定に関連するステップが含まれています。そのため、使用前にメニューバーから をクリックし、「step_geometric_tolerance_algo」 および 「step_measure2d」 のプラグインを有効にしてください。 |