ビジョンシステムのハードウェア設置
本ガイドを読むことで、Mech-Mindビジョンシステムの設置方法を習得できます。
Mech-Mindビジョンシステムの設置は、梱包内容の確認 → ハードウェアの取り付け → ネットワーク接続→ ソフトウェアのアップグレード(オプション)→ ビジョンシステムが画像を正常に取得できるか確認 の順で行う必要があります。
梱包内容の確認
-
お受け取りの際は、梱包に問題がないことを確認してください。
-
梱包中にある『同梱包一覧』を確認し、商品や付属品に欠品や損傷がないことを確認してください。
下図は、梱包箱に含まれるものおよび付属品の例を示しています。下記の同梱品一覧は参照のみを目的としています。梱包中に入っているものは、実際の梱包の中にある『同梱包一覧』をご参照ください。
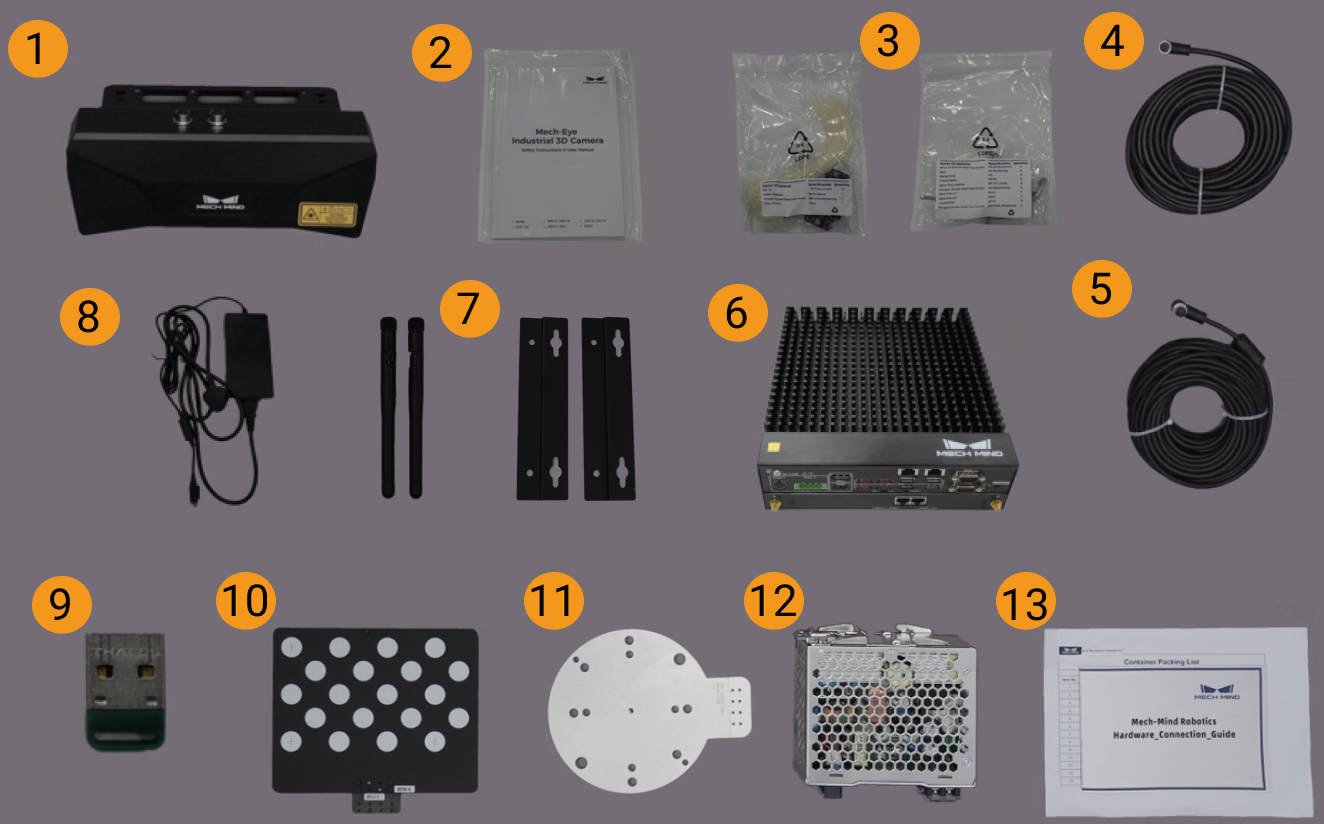
| 番号 | 種類 | 名前 | 機能 |
|---|---|---|---|
1 |
カメラと付属品 |
Mech-Eye産業用3Dカメラ |
画像取得 |
2 |
カメラ取扱説明書と技術仕様 |
Mech-Eye 産業用3Dカメラの取扱説明書と技術仕様 |
|
3 |
カメラの付属品 |
カメラの取り付け |
|
4 |
カメラ DC電源コード |
カメラとレール電源を接続する(必要に応じて異なる長さのカメラ電源ケーブルを選択可能) |
|
5 |
カメラのLANケーブル |
カメラとIPCを接続する(必要に応じて異なる長さのLANケーブルを選択可能) |
|
6 |
IPCと付属品 |
Mech-Mind IPC STD |
Mech-Mindソフトウェアの動作環境を提供する |
7 |
IPCの付属品 |
取付ブラケット、外部WiFiアンテナなどの付属品 |
|
8 |
IPCの電源ケーブルとアダプター |
IPCの電源を入れる |
|
9 |
その他の付属品 |
ソフトウェアライセンス認証装置(ドングル) |
ソフトウェアのライセンス供与 |
10 |
キャリブレーションボード |
カメラのキャリブレーション |
|
11 |
フランジ |
キャリブレーションボードの取り付け |
|
12 |
レール電源(オプション) |
Mech-Eye産業用3Dカメラの電源を入れる |
|
13 |
同梱品一覧 |
梱包に含まれるすべてのものと付属品を一覧表示する |
|
|
万一、商品紛失・破損等が発生した場合は、Mech-Mind株式会社にお問合せてください。 |
その他のものを準備
本ガイドでは、カメラ梱包に入っているものの他に、下表に示すようなものを自分で用意する必要があります。
| 名前 | 機能 |
|---|---|
モニター |
IPCの画面表示 |
HDMIケーブル |
IPCとモニターを接続する |
RJ45 LANケーブル |
IPCとコントローラを接続する |
| 本ガイドでは、IPCはRJ45 LANケーブルでコントローラと接続し、カメラのLANケーブルでカメラと接続します。ルータ経由でIPCをロボットコントローラに、IPCをカメラに接続することもできます。 |
ハードウェアの取り付け
カメラの取り付け
|
本ガイドでは、カメラはカメラブラケットに設置されています(Eye to Hand方式)。また、カメラをロボット先端に取り付けることも可能です(Eye in Hand方式)。 |
-
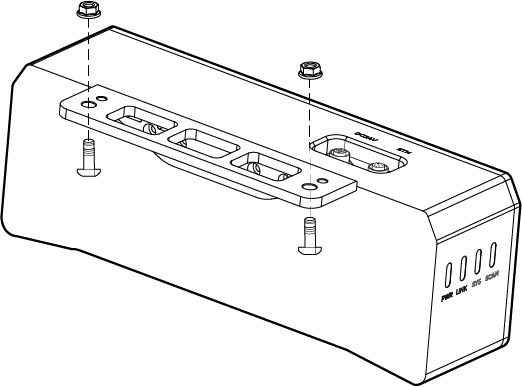
付属品からカメラを取り付けるためのネジとスパナを探します。
-
下図に示すように、レンチを使用して2本のネジを締め、カメラを固定します。
-
カメラを取り付け後、レンズ保護フィルムを剥がします。
-
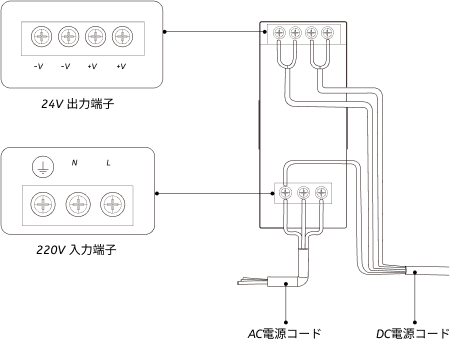
レール電源でカメラの電源を入れます。
-
DC電源ケーブルを以下のように接続します。
-
+Vを24V出力端子の+Vに接続します。
-
-Vを24V出力端子の-Vに接続します。
-
PEを220Vの入力端子
 に接続します。
に接続します。
-
-
-
カメラのLANケーブルを取り付けます。
カメラのLANケーブルの航空コネクタの突起をETHポートの開口部に差し込み、ナットを締めます。

IPCの取り付け
|
IPCは一般的にコントローラに設置されます。IPCの設置環境は、放熱性、通気性、防塵効果が必要であり、LANケーブル、HDMIケーブル、USBポートの設置やメンテナンスがしやすい場所を選択する必要があります。 |
IPCを取り付けるには、以下の手順を実行します。
-
スパナ、ネジ、ナット、スペーサーは自分でご用意ください。
-
コントローラにIPCの取り付け穴がある場合は、下図のようにネジ、スペーサー、ナットの順に入れ、スパナでナットを締めて、コントローラにIPCを取り付けます。

コントローラの位置が移動しない場合は、この手順を省略してIPCをコントローラに直接設置することができます。
-
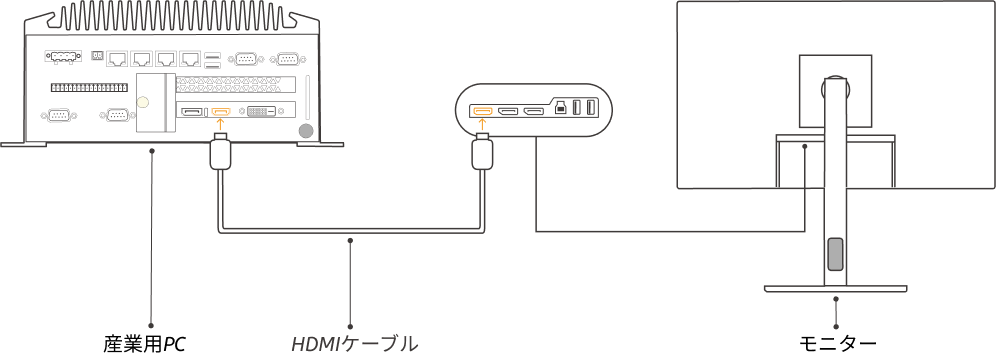
IPCとモニターをHDMIケーブルで接続します。
下図のように、HDMIケーブルの一端をモニターのHDMIポートに、もう一端をIPCのHDMIポートに差し込みます。
-
電源アダプタでIPCの電源を入れます。
電源アダプタの電源プラグをIPCの電源入力ポートに差し込み、電源アダプタのもう一方の端を電源に接続します。
-
ドングルを差し込みます。
ドングルをIPCのUSBポートに差し込みます。
-
IPCの電源が入った後、IPCを起動します。
-
IPCの正常な起動後は、電源インジケーターは常に点灯している必要があります。
-
IPCが起動できない場合は、Mech-Mind株式会社のテクニカルサポートにお問い合わせください。
-
ネットワーク接続
以下では、IPCとカメラとのネットワーク接続、IPCとロボットとのネットワーク接続について説明します。
以下の操作で、次のIPアドレスに従ってネットワークを設定します。実際のネットワーク環境に応じて調整してください。
| 機器 | IPアドレス | |
|---|---|---|
IPC |
カメラに接続されているLANポート |
192.168.100.10 |
コントローラに接続されているLANポート |
192.168.200.10 |
|
カメラ |
192.168.100.20 |
|
ロボット |
192.168.200.20(ロボットは設定済み) |
|
IPCとカメラ、IPCとコントローラを接続
-
カメラが接続されているLANケーブルのもう一方の端をIPCのLANポートに差し込みます。
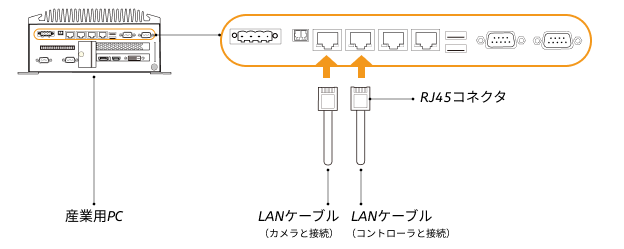
-
両端にRJ45コネクタが付いたLANケーブルを使用して、LANケーブルの一端をIPCのLANポートに、もう一端をロボットコントローラのLANポートに差し込みます。
IPCのIPアドレスを設定
-
IPCで、 を選択すると、ネットワークの接続 の画面が表示されます。
-
カメラが接続されているLANポートを選択し、右クリックして 名前の変更 を選択し、「To_camera」など、ネットワーク接続を示すポートに名前を変更します。
-
カメラが接続されているLANポートを選択し、右クリックして プロパティ を選択し、イーサネットのプロパティ の画面に入ります。
-
イーサネットプロトコルバージョン 4(TCP/IPv4) を選択して プロパティ をクリックし、Internet プロトコルバージョン 4(TCP/IPv4)のプロパティ の画面に入ります。
-
次のIPアドレスを使う を選択し、IPアドレス を「192.168.100.10」、サブネットマスク を「255.255.255.0」、デフォルトゲートウェイ を「192.168.100.1」に設定してから、OK をクリックします。

-
手順2~5を繰り返し、ロボットコントローラが接続されているLANポートの名前(To_robotなど)を変更し、LANポートのIPアドレスを設定します。例えば、LANポートのIPアドレスは「192.168.200.10」です。
コントローラに接続するIPCのLANポートのIPアドレスは、ロボットのIPアドレスと同じネットワークセグメント内にある必要があります。
カメラのIPアドレスを設定
-
IPCのデスクトップ上にある
 アイコンをダブルクリックし、Mech-Eye Viewerを起動します。
アイコンをダブルクリックし、Mech-Eye Viewerを起動します。 -
カメラ一覧からカメラを選択し、マウスをカメラ情報バーに移動すると、
 が表示されます。クリックすると IP設定画面 に入ります。
が表示されます。クリックすると IP設定画面 に入ります。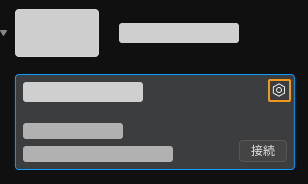
カメラが検出できないか、またはカメラに接続できない場合は、 カメラのトラブルシューティング を参照して解決してください。
-
IP設定 エリアで、静的IPに設定 を選択し、実際のネットワーク環境に基づいてIPアドレスクラス、IPアドレス、およびサブネットマスク を設定します。例えば、下図では、これらのパラメータが「クラスC 192.168.x.x」、「192.168.20.116」、および「255.255.255.0」に設定されています。その後、適用 をクリックします。

|
カメラのIPアドレスは、カメラが接続されているIPCのLANポートのIPアドレスと同じネットワークセグメント内にある必要があります。 |
ネットワーク接続をテスト
-
ショートカットキーWin + Rで 実行画面 を表示します。
-
名前 に
cmdと入力し、OK をクリックします。 -
コマンドウィンドウに ping XXX.XXX.XX.XX と入力し、Enter をクリックしてコマンドを実行します。
XXX.XXX.XX.XXは、実際に設定されたカメラまたはロボットのIPアドレスに変更します。
ネットワークの接続が正常であれば、次のようなメッセージが表示されます。
XXX.XXX.XX.XXにPingを送信しています 32バイトのデータ:
XXX.XXX.XX.XXからの応答:バイト数=32 時間<1ms TTL=128
XXX.XXX.XX.XXからの応答:バイト数=32 時間<1ms TTL=128
XXX.XXX.XX.XXからの応答:バイト数=32 時間<1ms TTL=128
XXX.XXX.XX.XXからの応答:バイト数=32 時間<1ms TTL=128ソフトウェアのアップグレード(オプション)
Mech-Mindから購入したIPCには、最新バージョンのMech-Mindソフトウェアがプリインストールされています。
本機のソフトウェアが最新バージョンであるかどうかを確認してください。ソフトウェアがすでに最新バージョンである場合は、以下の内容をスキップしてください。ソフトウェアが最新バージョンでない場合は、以下の内容を参照して、ソフトウェアを最新バージョンにアップグレードしてください。
取得した画像の品質を確認
IPC、カメラ、およびロボットのネットワーク接続が機能していることを確認し、すべてのソフトウェアが最新バージョンであることを確認した後、ビジョンシステムが画像を正常に取得し、画像品質が要件を満たしていることを確認する必要があります。
-
ワークをカメラ視野内の作業平面の中心に配置します。
-
IPCのデスクトップにある
アイコンをダブルクリックしてMech-Eye Viewerを起動します。 -
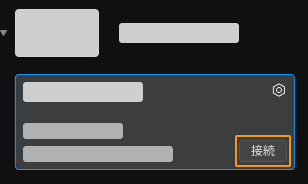
検出されたカメラからカメラを選択して 接続 をクリックします。
-
パラメータグループの「段ボール箱」テンプレートを選択した後、「一回キャプチャ」をクリックします。

-
エッジと最高層のワークがカメラの視野に入っていることを確認します。
-
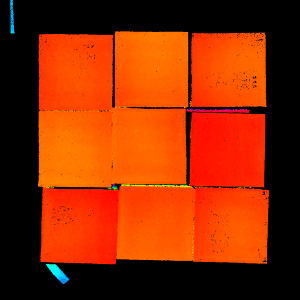
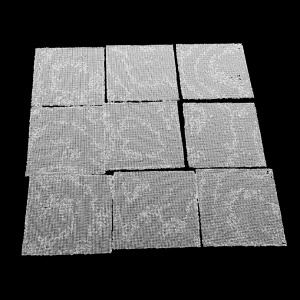
取得した画像品質が要件を満たしていることを確認します。合格画像の例は以下に示します。
-
2D画像:明らかな露出過度(白すぎて対象物が見えない)、露出不足(暗すぎて対象物のディーテールが判別できない)がありません。
-
深度画像と点群:対象物に激しい抜けがありません。
2D画像 深度画像 点群 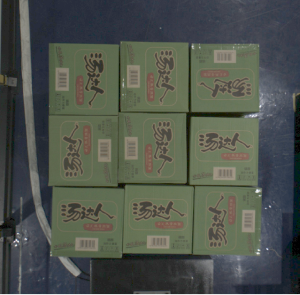
-
|
取得した画像が要件を満たさない場合、 Mech-Eye Viewerでパラメータを調整 してください。 |
以上でビジョンシステムのハードウェアの構築方法の説明は終わりです。