ワーク認識(反射性の高いワーク)
本ガイドでは、整列して並べられた反射性の高いワークの位置姿勢を正確に認識する方法を説明します。「ワーク認識(反射性の高いワーク)」のサンプルプロジェクトを例に、 ワーク認識 ステップのパラメータ調整方法と、実際の適用時の注意事項について詳しく解説します。
適用シーン |
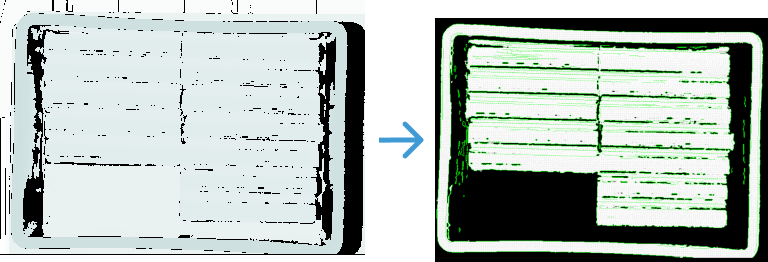
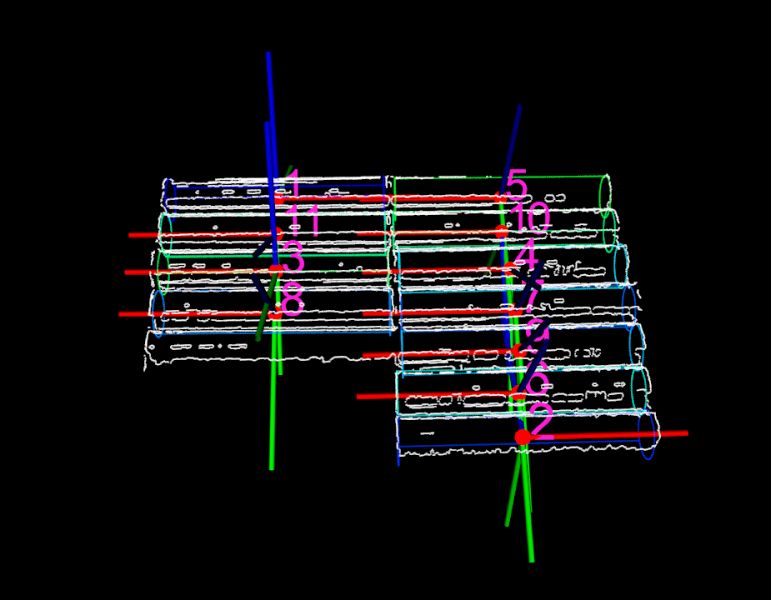
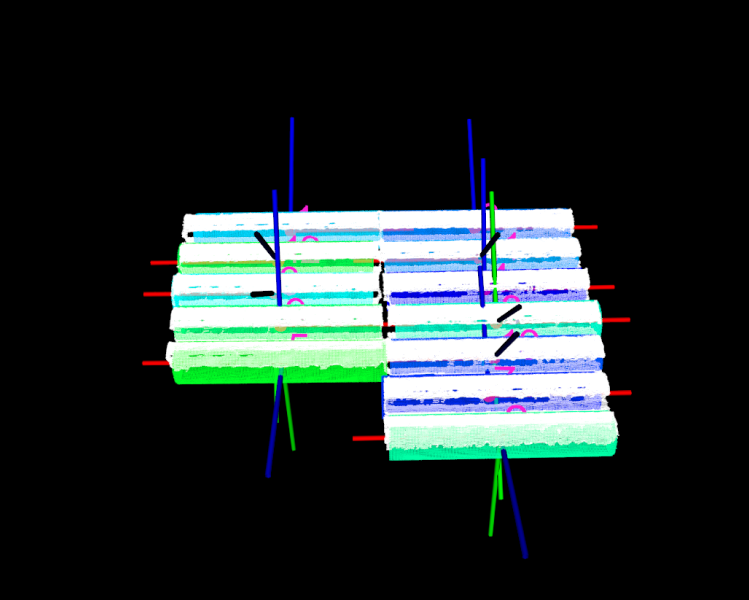
認識効果 |
|
|
以下は、このサンプルプロジェクトを基にした具体的な適用方法と注意事項の説明です。
実践ガイド
「ワーク認識(反射性の高いワーク)」プロジェクトは、Mech-Visionのソリューションライブラリに含まれています。「実践例 - 3D位置決め」タブからこのプロジェクトを取得し、作成してください。プロジェクトを作成した後、ワーク認識 ステップをクリックして選択します。設定ツール ボタンをクリックして、ワーク認識の設定ツール を開き、パラメータ調整を行います。点群の前処理、ワークの選択と認識、共通設定の3つの手順が含まれます。

-
点群前処理:取得された画像データを点群に変換し、有効な点群認識領域を設定します。その後、エッジ点群を検出し、要件を満たしていない点群を除去して、認識効率を向上させます。
-
ワークの選択と認識:ワークモデルと把持位置姿勢の作成が完了した後、使用するビジョン認識方法に基づいてディープラーニングモデルパッケージを設定するかどうかを選択し、ワークの認識パラメータを調整します。ワーク認識のソリューションがワークを安定かつ正確に認識できるように、設定されたパラメータが要件を満たしていることを確保してください。
-
共通設定:出力ポートの設定を行います。実際の把持タスクに応じて、把持位置姿勢や対象物中心点などの関連情報出力を選択できます。
以下は、各手順の主要なパラメータの説明です。
ワークの選択と認識
点群前処理が完了した後、ワークライブラリでワークの点群モデルを作成し、モデルのマッチングに関連するパラメータを設定する必要があります。
-
ワークのモデルを作成します。
ワークライブラリを開く をクリックしてワークライブラリを開きます。基本幾何立体を作成して点群モデルを生成し、把持位置姿勢を手動で設定 します。モデルを設定した後、保存 をクリックします。「ワーク認識」設定ツールに戻り、ワークを更新 をクリックして作成されたワークモデルを選択します。
基本幾何立体を作成することで点群モデルを生成する場合、事前にワークの寸法を測定する必要があります。ワークを追加 画面では、幾何学的パラメータを設定 の下にワークの 半径 と 高さ を入力して標準幾何立体モデルを生成します。 -
こちら からディープラーニングモデルパッケージをダウンロードした後、それをインポートして選択します。ROIを設定し、推論設定 ウィンドウで インスタンスセグメンテーション の 信頼度しきい値 を 0.30 に設定して、信頼度が低い結果や分割効果が要件を満たしていない結果を除去します。このしきい値を超える結果は保持されます。
ROIを設定する際には、より良いディープラーニング認識結果を取得するために、またコンテナの位置の変動を防ぐために、コンテナの上下左右に適切に余裕を持たせて拡張する必要があります。 -
認識関連パラメータを設定 します。
以下のパラメータ設定は参考情報です。現場の具体的な状況に応じて調整してください。 -
ワーク認識 の右にある 上級モード を有効にします。
-
マッチングモードを設定:このプロジェクトで マッチングモードの自動設定 を使用した場合、認識結果の精度が現場の要求を満たさない可能性があります。そのため、自動設定を無効にして、パラメータを手動で調整することをお勧めします。
エッジ点群が大きく変動して認識精度が要件を満たしていない場合は、精度を向上させるために 低精度マッチングモード と 高精度マッチングモード の両方を サーフェスマッチング に設定します。
マッチングモードを自動的に設定
関連するパラメータを手動で設定
-
高精度マッチング設定を調整:認識精度をさらに向上させるために、実行モード を 高精度 に、偏差補正能力 を 中レベル に設定します。
-
信頼度しきい値を設定:最高層に配置されたすべてのワークを正確に認識するために、信頼度しきい値 を設定する必要があります。このプロジェクトでは 信頼度の設定方式 を 自動 に設定した場合の認識結果が現場の認識要件を満たしているため、このパラメータを 自動 に設定し、信頼度しきい値 を指定する必要があります。パラメータの初期値は 0.3000 です。
左側の可視化ウィンドウの下にある認識結果レポートの最初のドロップダウンメニューから 出力結果 を選択します。サーフェスマッチングの信頼度 の値が設定したしきい値よりも高いワークのみが保持されます。現場の状況に応じて認識結果を確認してください。誤認識や見逃し認識がある場合は、それぞれのしきい値を上げたり下げたりしてください。 -
出力 - 出力結果の最大数:このパラメータ値を層全体のワーク数に設定します。このプロジェクトでは、出力結果の最大数 を 14 に設定しています。
-
設定完了後、次へ をクリックして「共通設定」に進みます。
共通設定
ワーク認識が完了後、ビジョン認識以外の補助機能設定を行います。現在は、出力ポートの内容を設定し、後続ステップに認識結果と点群を提供することが可能です。
ロボットがワークを正常に把持するように、ワークの中心点を調整し、そのZ軸がコンテナの中心を指すようにします。ポートを選択 では 対象物の中心点に関連するポート を選択し、カメラで取得した元の点群 と 前処理後の点群 にチェックを入れます。出力された点群情報は、それぞれ経路計画時の衝突検出とコンテナの位置決めに使用されます。
| 現場で特定の要件がある場合は、実際のニーズに基づいて出力ポートを適切に設定してください。 |
これで、関連するパラメータの調整が完了しました。保存 をクリックして変更を保存します。
注意事項
実際のアプリケーションでは、以下の注意事項に従った上で、プロジェクトに ワーク認識 ステップを追加し、データフローを接続してください。
-
「ワーク認識」ステップは通常、カメラから画像を取得 ステップと連携し、金属部品の供給シーンで使用されます。単独に配置されるワーク、単段に整列されるワーク、複数段に整列されるワーク、バラ積みされたワークなど、様々な形状のワークや配置状態に対応します。
-
「ワーク認識」ステップの後には、通常、位置姿勢を一括調整(V2) の位置姿勢調整ステップが接続されます。
このサンプルプロジェクトは、整列して並べられたワークの位置姿勢を正確に認識する方法を示すことを目的としており、位置姿勢調整についての説明は含まれていません。