把持位置姿勢のラベルに基づく異なる把持戦略の実行
以下では、把持位置姿勢のラベルによって異なる把持戦略を実行する方法について説明します。
操作手順
ワークライブラリの把持位置姿勢のラベルに基づく異なる把持戦略の実行
-
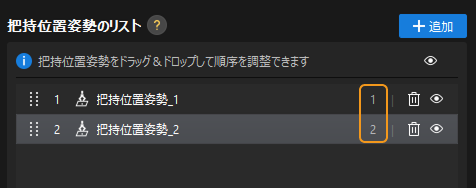
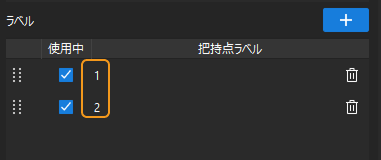
ワークライブラリで把持位置姿勢の数値ラベルを設定します。
ワークライブラリの把持位置姿勢リストで、異なる把持位置姿勢に異なるラベルを設定します。
-
Mech-Visionで 出力 ステップのパラメータを設定します。
パラメータ パラメータ値 ポートタイプ
事前定義済み(ビジョン結果)
シーンを選択
マッチング
-
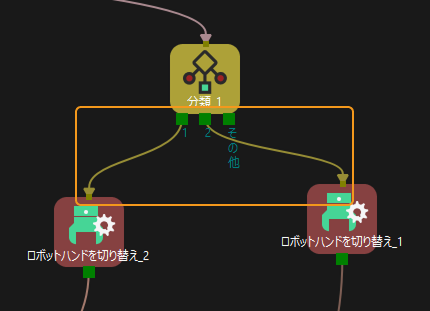
Mech-Vizで 分類 ステップを設定します。
-
ステップパラメータを設定します。
パラメータ パラメータ値 分岐選択の基準
把持点のラベル
-
ステップにラベルを追加します。
ここで追加するラベルは、ワークライブラリで設定した把持位置姿勢のラベルと一致させる必要があります。
-
-
Mech-Vizで異なる把持戦略を実行します。
Mech-Vizプロジェクトを実行すると、把持位置姿勢のラベルに基づき異なる把持戦略が適用されます。
Mech-Visionプロジェクト内でカスタマイズした把持位置姿勢のラベルに基づく異なる把持戦略の実行
ワークライブラリの把持位置姿勢のラベルでは適切な分類ができない場合、Mech-Visionプロジェクトでカスタムラベルを設定し、Mech-Vizでそのラベルに基づく異なる把持戦略を実行できます。
以下では、「位置姿勢と基準方向の角度」に基づきカスタム把持位置姿勢のラベルを作成し、それに基づき異なる把持戦略を実行する方法を説明します。
-
Mech-Visionで 出力 ステップのパラメータを設定します。
カスタム把持位置姿勢のラベルを受信するために、「その他の入力」にチェックを入れ、「出力」ステップに「把持位置姿勢のラベル」入力ポートを追加します。
-
Mech-Visionでカスタムラベルを生成します。
以下のフローに従い、ステップを組み合わせてワークの角度を判定し、ワークの基準方向との角度に基づきカスタム把持位置姿勢のラベル(例:1、2)を生成し、「出力」ステップの「把持位置姿勢のラベル」入力ポートに送信します。
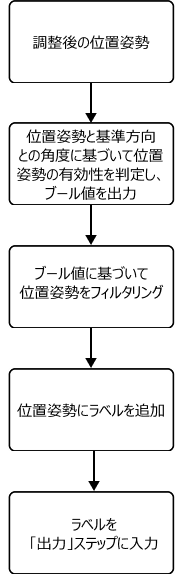
作成されたステップの組合せは下図のようになります。

-
Mech-Vizで 分類 ステップを設定します。
-
ステップパラメータを設定します。
パラメータ パラメータ値 分岐選択の基準
把持点のラベル
-
ステップにラベルを追加します。
ここで追加するラベルは、Mech-Visionプロジェクトでカスタマイズした把持位置姿勢のラベルと一致させる必要があります。
-
-
Mech-Vizで異なる把持戦略を実行します。
Mech-Vizプロジェクトを実行すると、把持位置姿勢のラベルに基づき異なる把持戦略が適用されます。