ビジョンソリューションの設計
導入前に、プロジェクトの実際の要件に基づいてビジョンソリューションを設計し、カメラ型番、IPC型番、カメラの取り付け方式、およびロボットの通信方法などを確定する必要があります。これらの項目を確定することで、3Dビジョンシステムによるアプリケーションの迅速な導入が可能となります。
この段階では、以下のことを完了させてください。
| 高い把持精度が求められるプロジェクトの場合は、導入する際には 上級ガイド:把持精度の向上 を参照して関連設定を行ってください。 |
カメラ型番を選択
Mech-Eye産業用3Dカメラは、Mech-Mindが独自に開発した高性能な産業用3Dカメラです。多種多様なワークに対し、高精度な点群データの生成が可能です。カメラごとに外乱光耐性/小型/ミクロン単位の高精度といった特徴があり、豊富な製品ラインナップで様々なニーズに対応します。
実際のプロジェクトでは、カメラのワーキングディスタンス、視野、および精度の要件に基づいて、適切な型番を選択してください。
カメラ型番を選択する際には、以下のことが参考になります。
-
カメラ型番選択ツール を使用して、対象物の寸法に応じて適切な型番を選択します(V4カメラのみ対応)。
-
カメラ視野計算機 を使用して、ワーキングディスタンスと視野に基づいて適切な型番を選択します。
-
複数の型番が要件を満たす場合、カメラの特徴と利用シーン を参照して最適な型番を選択してください。サポートが必要な場合は、Mech-Mind株式会社の営業担当やプリセールスにお問い合わせください。
キャリブレーションボードの型番を選択
キャリブレーションボードは、内部パラメータのチェックと外部パラメータのキャリブレーションに使用され、キャリブレーションの精度と安定性に影響を与えます。Mech-Mindでは、三種類のキャリブレーションボードを提供しています。詳細は、キャリブレーションボード をご参照ください。
実際のプロジェクトでは、以下の表を参考にして、カメラ型番と実際のワーキングディスタンスに基づいて適切なキャリブレーションボードを選択してください。
カメラの取り付け方式を選択
カメラとロボットの相対的な位置関係やタクトタイム要件に応じて、カメラの取り付け方式を選択します。一般的な取り付け方式には「Eye to hand(ETH)」と「Eye in hand(EIH)」があります。
取り付け方式 |
Eye to hand(ETH) |
Eye in hand(EIH) |
|---|---|---|
説明 |
カメラがスタンドに取り付けられています。 |
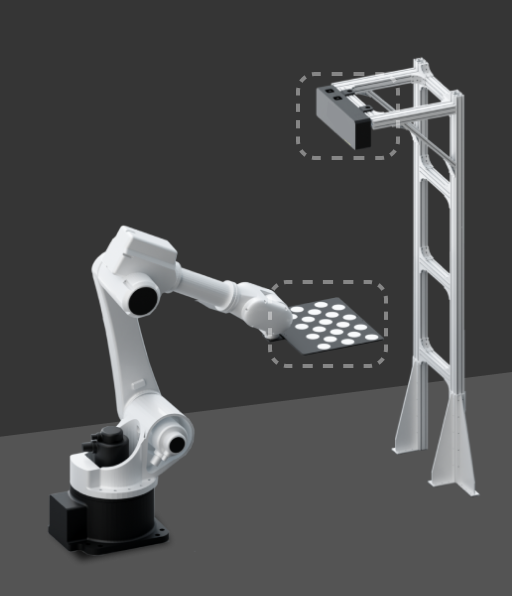
カメラはロボット先端に取り付けられています。 |
説明図 |
|
|
特徴 |
|
|

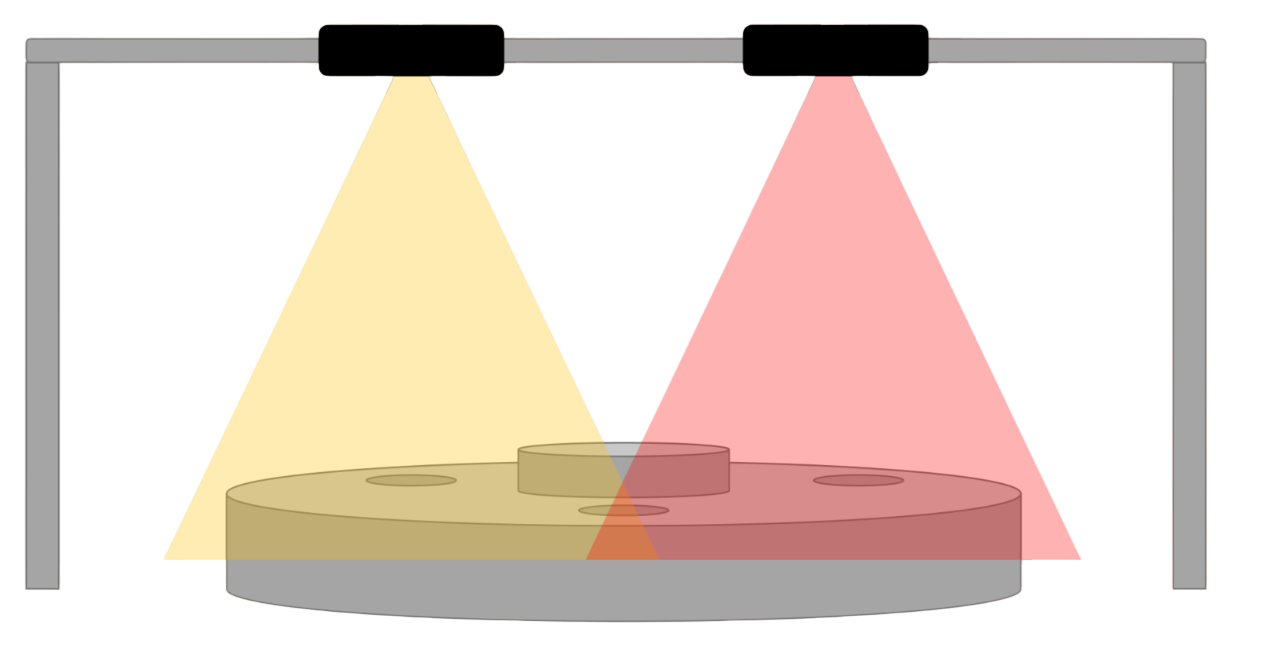
また、カメラの視野を拡大し、重複した視野の点群の品質を向上させるために、プロジェクトでは複数のカメラを取り付けることがあります。これは「Eye to eye(ETE)」取り付け方式と呼ばれます。
どのカメラ取り付け方式を選択するにしても、取り付けにはカメラ取り付けスタンドを使用します。カメラ取り付けスタンドの設計に関する詳細な情報は、カメラ取り付けスタンドの設計 をご参照ください。
IPC型番を選択
Mech-MindのIPCは、Mech-Mindソフトウェアが必要とする標準的な実行環境を提供し、ソフトウェアの機能と性能を最適化できます。
IPCの 適用シーンや技術仕様 に基づいて、IPC型番を選択してください。詳細は下表の通りです。
| 技術仕様 | 適用シーン | Mech-Mind IPC STD | Mech-Mind IPC ADV | Mech-Mind IPC PRO |
|---|---|---|---|---|
同時に実行可能なMech-Visionプロジェクト数 |
標準インターフェース/Adapter通信(経路計画ステップなし) |
≤5 |
≤5 |
≤5 |
標準インターフェース/Adapter通信(経路計画ステップあり) |
≤5 |
≤5 |
≤5 |
|
Vizティーチング通信(Mech-Vizソフトウェアを使用) |
≤5 |
≤5 |
≤5 |
|
3Dビジョンソリューション(3Dマッチングを使用) |
≤5 |
≤5 |
≤5 |
|
3Dビジョンソリューション(3Dマッチングおよび2Dディープラーニングを使用) |
≤2 |
≤2 |
≤4 |
|
1つのソリューションで接続可能なカメラの数 |
≤2 |
≤2 |
≤2 |
|
1つのソリューションで読み込み可能なディープラーニングモデルの数 |
≤5(CPU) |
≤5(GPU) |
<8(GPU) |
|
1つのソリューションで接続可能なロボットの数(Vizティーチング通信) |
1 |
1 |
1 |
|
1つのソリューションで同時に有効化できる通信方式の数 |
1 |
1 |
1 |
|
1つのソリューションで同時に接続可能なクライアントの数(標準インターフェース/Adapter通信) |
≤4 |
≤4 |
≤4 |
|
自分で用意したデバイス(PCまたはノートパソコン)をIPCとして使用する場合、自分で用意したIPCの設定 を参照してそれがシステムの構成要件を満たしていることを確認し、関連する設定を完了してください。
ディープラーニングを使用するかどうかを確認
ディープラーニングソリューションを選択 を参照して、ビジョンソリューションにディープラーニングが必要であるかどうかを確認してください。
ビジョン認識のプロセスでは、3Dマッチングだけでは以下の問題を解決できない場合、ディープラーニングの使用が必要になります。
| 番号 | 従来の方法における課題 | 説明図 |
|---|---|---|
1 |
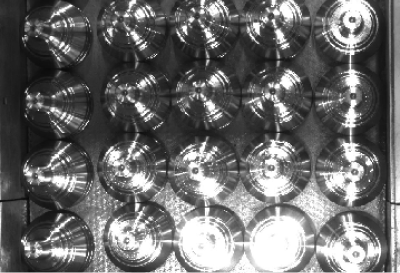
ワーク表面に高い反射性があり、点群品質が低い場合。 |
|
2 |
ワーク点群に曲面特徴が少なく、特徴点群の数が少ない場合。 |
|
3 |
ワーク同士が整列して並べられ、密集しており、かつ点群のクラスタリング効果が悪い場合。 |
|
4 |
ワーク特徴がカラー画像にのみ存在し、ワーク点群に特徴がない場合。 |
|
5 |
プロジェクトがビジョンタクトタイムに高い要件が求められている場合。例えば、ワーク数が多い場合、点群モデルのマッチングに時間がかかります。 |
|