位置姿勢の繰り返し精度を検証
ビジョンプロジェクトの構築が完了した後、位置姿勢の繰り返し精度を検証することでプロジェクトの安定性を確認することができます。
検証方法
プロジェクト認識の繰り返し精度を検証するには、Mech-Visionの 統計データで位置姿勢の繰返し精度をチェック ステップを使用する必要があります。
詳細な検証手順は以下の通りです。
-
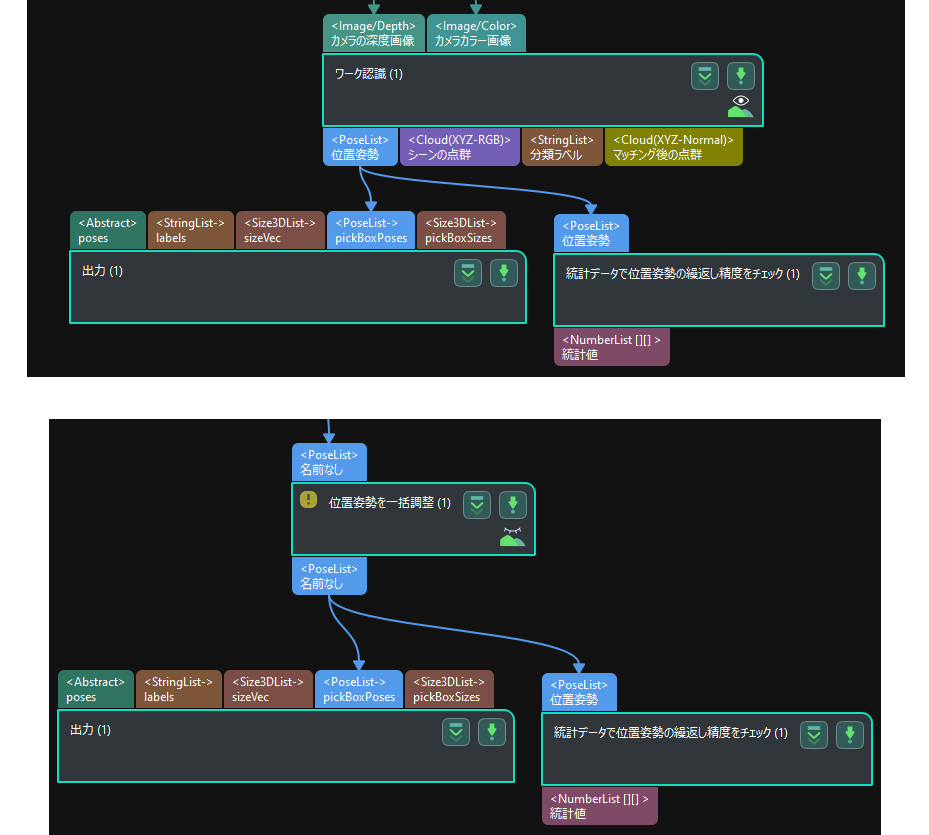
「統計データで位置姿勢の繰返し精度をチェック」ステップをプロジェクトに追加します。
下図に示すように、このステップを対象物の位置姿勢を出力できるステップの後につなぎます。
-
単一のワークをカメラの視野内に配置し、プロジェクトを10回から20回実行して、そのワークの出力された位置姿勢を取得し、統計します。これにより、位置姿勢の繰り返し精度を判断します。
-
統計データに格納されているファイルを開いて、位置姿勢の繰り返し精度を確認します。
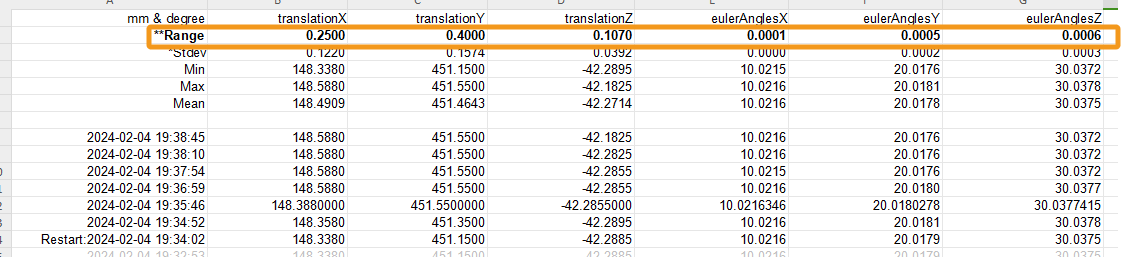
上記の図に示すように、表の「range」(範囲誤差またはレンジ)行は、その位置でのワークの位置姿勢の繰り返し精度を示しています。
-
x軸座標の誤差範囲はおおよそ±0.25mmです。
-
y軸座標の誤差範囲はおおよそ±0.40mmです。
-
z軸座標の誤差範囲はおおよそ±0.11mmです。
-
-
把持領域が広い場合や、特定の領域で把持精度が安定しない場合は、同じワークの位置姿勢の繰り返し精度を異なる位置で統計する必要があります。
深い箱からピッキングの場合は、異なる高さの異なる位置で位置姿勢の繰り返し精度を統計する必要があります。例えば、箱の平面を9つの同じ大きさのエリアに分割し、異なる高さで位置姿勢の繰り返し精度を統計することができます。 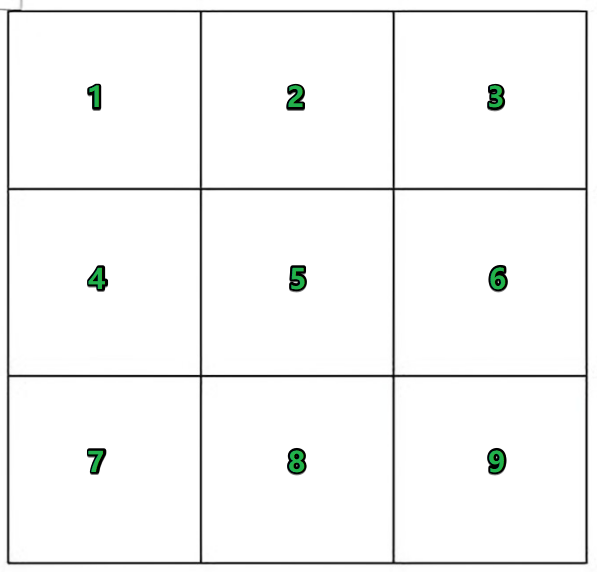
検証基準
通常、x/y/z軸座標の誤差範囲が±0.5mm以内である場合、プロジェクトの精度要件を満たしています。
高精度が必要な場合、x/y/z軸座標の誤差範囲はより小さくする必要があります。たとえば、±0.1mmなどです。誤差範囲が大きい場合は、プロジェクトの認識精度を向上 させる必要があります。