ビジョンシステムのハードウェア設置
本ガイドを読むことで、Mech-Mindビジョンシステムの設置方法を習得できます。
Mech-Mindビジョンシステムの設置は、梱包内容の確認 → ハードウェアの取り付け → ネットワーク接続→ソフトウェアのアップグレード(オプション) → ビジョンシステムが画像を正常に取得できるか確認 の順で行う必要があります。
動画:ビジョンシステムのハードウェア設置
|
梱包内容の確認
-
お受け取りの際は、カメラ梱包箱に問題がないことを確認してください。
-
梱包箱中にある『同梱包一覧』を確認し、商品や付属品に欠品や損傷がないことを確認してください。
下図は、梱包箱に含まれるものや付属品の例を示しています。以下の同梱品一覧は参照用です。実際の梱包内容は、梱包箱内の『同梱包一覧』をご確認ください。

| 番号 | 種類 | 名前 | 機能 |
|---|---|---|---|
1 |
IPCと付属品 |
Mech-Mind IPC STD |
Mech-Mindソフトウェアの動作環境を提供 |
2 |
IPCの付属品 |
取付ブラケット、外部WiFiアンテナ、固定ネジなどの付属品 |
|
3 |
IPCの電源ケーブル |
IPCの電源を入れる |
|
4 |
カメラと付属品 |
Mech-Eye産業用3Dカメラ |
画像取得 |
5 |
カメラ取扱説明書 |
Mech-Eye産業用3Dカメラの取扱説明書 |
|
6 |
カメラの付属品 |
カメラの取り付け |
|
7 |
その他の付属品 |
ドングル |
ソフトウェアのライセンス供与 |
8 |
キャリブレーションボード |
カメラキャリブレーション |
|
9 |
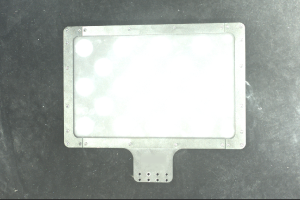
フランジ |
キャリブレーションボードの取り付け |
|
10 |
カメラDC電源ケーブル(標準仕様20メートル) |
カメラをレール電源に接続(オプションでより長い電源ケーブルも利用可能) |
|
11 |
カメラのLANケーブル(標準仕様20メートル) |
カメラをIPCに接続(オプションでより長いLANケーブルも利用可能) |
|
12 |
レール電源(標準仕様) |
Mech-Eye産業用3Dカメラの電源を入れる(オプションで電源アダプターも利用可能) |
|
13 |
同梱品一覧 |
梱包に含まれるすべてのものと付属品を一覧表示します |
|
|
万一、商品紛失・破損等が発生した場合は、Mech-Mind株式会社にお問合せてください。 |
その他のものを準備
本ガイドでは、カメラ梱包に入っているものの他に、下表に示すようなものを自分で用意する必要があります。
| 名前 | 機能 |
|---|---|
モニター |
IPCの画面表示 |
HDMIケーブル |
IPCとモニターを接続 |
RJ45 LANケーブル |
IPCとコントローラを接続 |
| 本ガイドでは、IPCはRJ45 LANケーブルでコントローラと接続し、カメラのLANケーブルでカメラと接続します。ルータ経由でIPCをロボットコントローラに、IPCをカメラに接続することもできます。 |
ハードウェアの取り付け
カメラの取り付け
|
本ガイドでは、カメラはカメラスタンドに設置されています(Eye to Hand方式)。また、カメラをロボット先端に取り付けることも可能です(Eye in Hand方式)。 |
-
付属品からカメラを取り付けるためのネジとスパナを探します。
-
下図に示すように、レンチを使用して2本のネジを締め、カメラを固定します。
-
カメラを取り付け後、レンズ保護フィルムを剥がします。
-
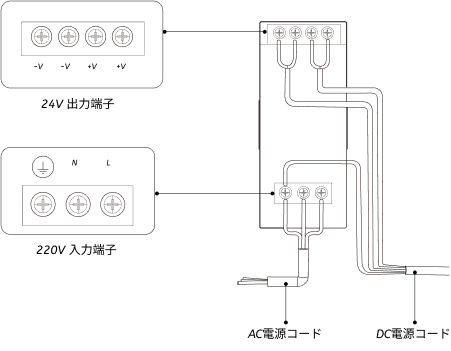
レール電源でカメラの電源を入れます。
-
DC電源ケーブルの接続:
-
+Vを24V出力端子の+Vに接続します。
-
-Vを24V出力端子の-Vに接続します。
-
PEを220V入力端子
 に接続します。
に接続します。
-
-
-
カメラのLANケーブルを取り付けます。
カメラのLANケーブルの航空コネクタの突起をETHポートの開口部に差し込み、ナットを締めます。

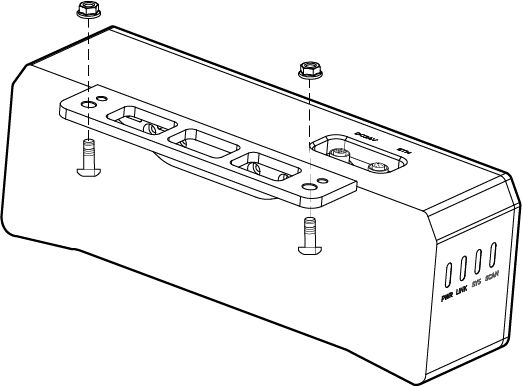
IPCの取り付け(取り付けブラケットによる)
以下の手順で、2つの取り付けブラケットを使用して、埋め込み型デバイスを壁などの平らな面に固定します。
-
デバイスを逆さまにします。
-
底面にある固定用のねじ穴と、取り付けブラケットの両側にあるねじ穴を合わせます。
-
ブラケットにねじを挿し込み、デバイスとブラケットを固定します。

-
予め決められた表面に穴を開けます。
-
ブラケットの両側の取り付け穴と、決められた表面の穴を合わせます。
-
デバイスを目標の取り付け表面に固定するために、4つの固定ねじを挿入し締めます。
-
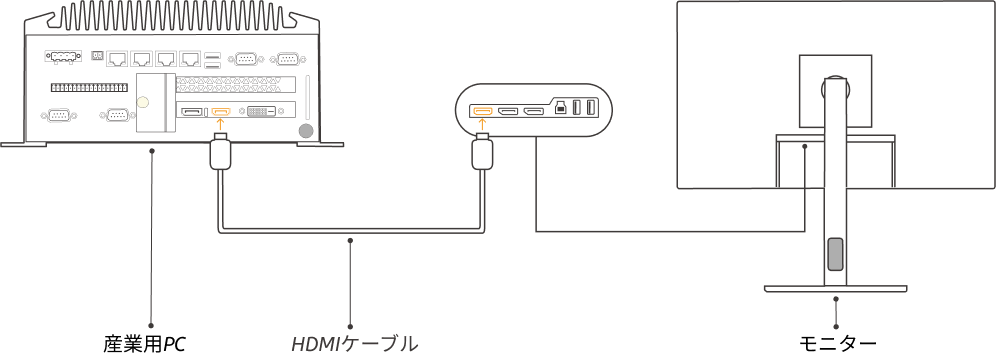
IPCとモニターをHDMIケーブルで接続します。
下図のように、HDMIケーブルの一端をモニターのHDMIポートに、もう一端をIPCのHDMIポートに差し込みます。
-
電源アダプタでIPCの電源を入れます。
電源アダプタの電源プラグをIPCの電源入力ポートに差し込み、電源アダプタのもう一方の端を電源に接続します。
-
ドングルを差し込みます。
ドングルをIPCのUSBポートに差し込みます。
-
IPCの電源が入った後、IPCを起動します。
-
IPCが正常に起動する場合、電源インジケーターは常に点灯しています。
-
IPCが起動しない場合は、Mech-Mind株式会社の技術サポートにお問い合わせください。
-
ネットワーク接続
以下では、IPCとカメラとのネットワーク接続、IPCとロボットとのネットワーク接続について説明します。
以下の操作で、次のIPアドレスに従ってネットワークを設定します。実際のネットワーク環境に応じて調整してください。
| 機器 | IPアドレス | |
|---|---|---|
IPC |
カメラに接続されているLANポート |
192.168.100.10 |
コントローラに接続されているLANポート |
192.168.200.10 |
|
カメラ |
192.168.100.20 |
|
ロボット |
192.168.200.20(ロボットは設定済み) |
|
IPCとカメラ、IPCとロボットコントローラを接続
-
カメラが接続されているLANケーブルのもう一方の端をIPCのLANポートに差し込みます。
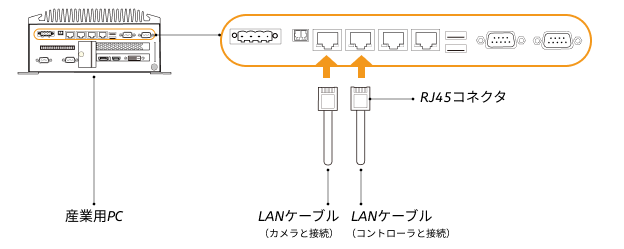
-
両端にRJ45コネクタが付いたLANケーブルを使用して、LANケーブルの一端をIPCのLANポートに、もう一端をロボットコントローラのLANポートに差し込みます。
IPCのIPアドレスを設定
-
IPCで、 を選択すると、 ネットワークの接続 の画面が表示されます。
-
カメラが接続されているLANポートを選択し、右クリックして名前の変更を選択し、「To_camera」など、ネットワーク接続を示すポートに名前を変更します。
-
カメラが接続されているLANポートを選択し、右クリックしてプロパティを選択し、イーサネットのプロパティの画面に入ります。
-
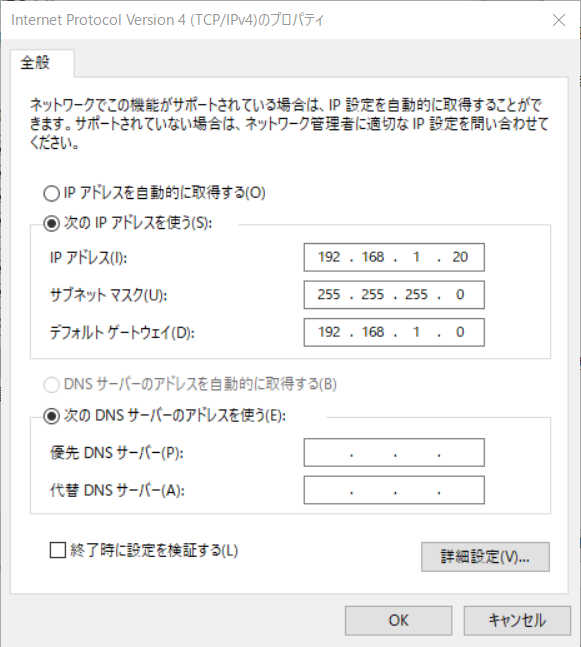
イーサネットプロトコルバージョン 4(TCP/IPv4)を選択してプロパティをクリックし、Internet プロトコルバージョン 4(TCP/IPv4)のプロパティの画面に入ります。
-
次のIPアドレスを使うを選択し、IPアドレスを「192.168.100.10」、サブネットマスクを「255.255.255.0」、デフォルトゲートウェイを「192.168.100.1」に設定してから、OKをクリックします。
-
手順2~5を繰り返し、ロボットコントローラが接続されているLANポートの名前を変更し(例:To_robot)、LANポートのIPアドレスを設定します。例えば、LANポートのIPアドレスは「192.168.200.10」です。
ロボットコントローラに接続するIPCのLANポートのIPアドレスは、ロボットのIPアドレスと同じネットワークセグメント内にある必要があります。
カメラのIPアドレスを設定
-
IPCのデスクトップ上にある
 アイコンをダブルクリックし、Mech-Eye Viewerを起動します。
アイコンをダブルクリックし、Mech-Eye Viewerを起動します。 -
カメラ一覧からカメラを選択し、マウスをカメラ情報バーに移動すると、
 が表示されます。クリックすると IP設定画面 に入ります。
が表示されます。クリックすると IP設定画面 に入ります。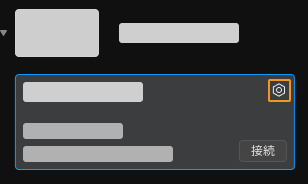
カメラが検出できないか、またはカメラに接続できない場合は、カメラのトラブルシューティング を参照して問題を解決してください。
-
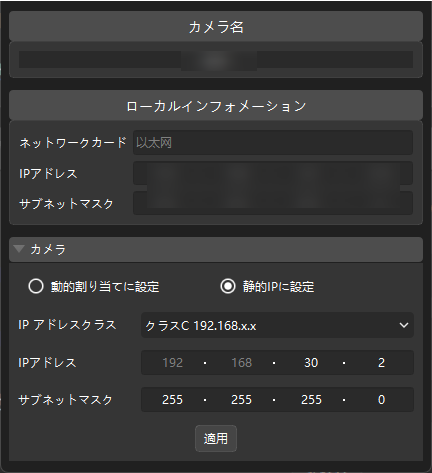
カメラ エリアで、静的IPに設定 を選択し、IPアドレスクラス を「クラスC 192.168.x.x」、IPアドレス を「192.168.100.20」、サブネットマスク を「255.255.255.0」に設定してから、適用 をクリックします。
|
カメラの IP アドレスは、カメラが接続されている IPC のLANポートの IP アドレスと同じネットワークセグメント内にある必要があります。 |
ネットワーク接続をテスト
-
ショートカットキーWin + Rで実行画面を表示します。
-
名前 に
cmdと入力し、OK をクリックします。 -
コマンドウィンドウに ping XXX.XXX.XX.XX と入力し、Enter をクリックしてコマンドを実行します。
XXX.XXX.XX.XXは、実際に設定されたカメラまたはロボットのIPアドレスに変更します。
ネットワークの接続が正常であれば、次のようなメッセージが表示されます。
XXX.XXX.XX.XXにPingを送信しています 32バイトのデータ:
XXX.XXX.XX.XXからの応答:バイト数=32 時間<1ms TTL=128
XXX.XXX.XX.XXからの応答:バイト数=32 時間<1ms TTL=128
XXX.XXX.XX.XXからの応答:バイト数=32 時間<1ms TTL=128
XXX.XXX.XX.XXからの応答:バイト数=32 時間<1ms TTL=128ソフトウェアのアップグレード(オプション)
Mech-Mindから購入したIPCには、最新バージョンのMech-Mindソフトウェアがプリインストールされています。
本機のソフトウェアが最新バージョンであるかどうかを確認してください。ソフトウェアがすでに最新バージョンである場合は、以下の内容をスキップしてください。ソフトウェアが最新バージョンでない場合は、以下の内容を参照して、ソフトウェアを最新バージョンにアップグレードしてください。
取得した画像の品質を確認
IPC、カメラ、およびロボットのネットワーク接続が機能していることを確認し、すべてのソフトウェアが最新バージョンであることを確認した後、ビジョンシステムが画像を正常に取得し、画像品質が要件を満たしていることを確認する必要があります。
-
ワークをカメラの視野中心に置き、エッジと最高層にあるワークがカメラの視野に入っていることを確認します。
-
IPCのデスクトップにある
アイコンをダブルクリックしてMech-Eye Viewerを起動します。 -
カメラ一覧からカメラを選択して 接続 をクリックします。
-
カメラ接続後、一回キャプチャ をクリックします。

-
取得した画像品質が要件を満たしていることを確認します。
-
2D画像:輝度が適切で、対象物の表面のディテールがはっきりと見られます。
正常 露出過度 露出不足 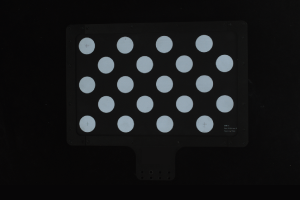

-
深度画像と点群:対象物のデータが完全に見られます。
完全な点群 不完全な点群 不完全な点群 
-
|
取得した画像が要件を満たさない場合、Mech-Eye Viewerでパラメータを調整 してください。 |
以上でビジョンシステムのハードウェアの構築方法の説明は終わりです。