カメラの内部パラメータをチェック
以下では、カメラの内部パラメータをチェックし、補正する方法について説明します。
準備作業の確認
内部パラメータをチェックする前に、以下の要件に従ってキャリブレーションを準備してください。
-
カメラの視野内にキャリブレーションボードを配置し、それがカメラの推奨ワーキングディスタンス内にあり、かつカメラの光軸対して垂直であることを確認してください。

-
キャリブレーションボードの2D画像と深度画像を取得します。取得した2D画像と深度画像が以下の要件をを満たしていることを確認してください。
-
キャリブレーションボード上のすべての円が完全に含まれている。
-
2D画像が明る差が適切で、キャリブレーションボード上の円がきれいで完全に見られる。
-
深度画像でキャリブレーションボード上の円が完全に見られる。
-
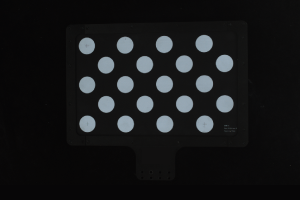
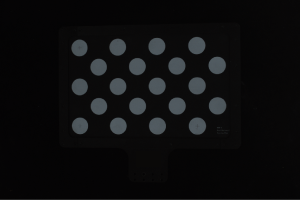
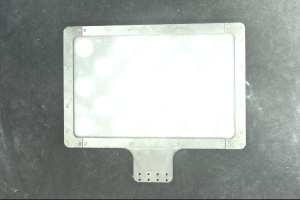
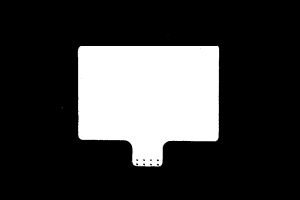
キャリブレーションボードの2D画像の例は下図のようです。
| 画像が暗くて、キャリブレーションボードの円ははっきり見えない | キャリブレーションボードの円は完全でエッジもはっきり見える | 画像が明るすぎてキャリブレーションボードの円ははっきり見えない | |
|---|---|---|---|
|
|
|
|

取得した2D画像が要件を満たさない場合、2Dパラメータ を調整してください。
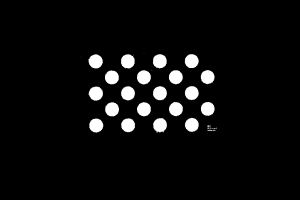
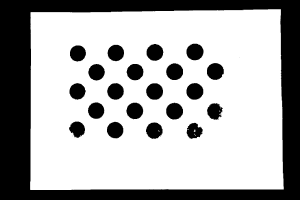
キャリブレーションボードの深度画像の例は下図のようです。
| 露出時間が短くて円は完全に撮れない | 円/キャリブレーションボードは完全に撮れる | 露出時間が長くて円は完全に撮れない | |
|---|---|---|---|
|
|
|
|
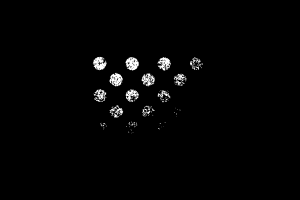
取得した深度画像が要件を満たさない場合、深度画像関連パラメータ を調整してください。
また、内部パラメータをチェックする前に、カメラを事前に予熱してください。カメラが熱平衡に達するまで、点群再構築の精度を十分に保証することはできません。カメラの予熱は、以下のいずれかの方法で行います。
-
Mech-Eye ViewerまたはMech-Eye APIを使用してカメラに接続し、30分以上の連続キャプチャを行います。
-
カメラの電源を入れてから40分以上待機します。
チェック方法
-
Mech-Eye Viewerを起動し、メニューバーの ツール をクリックし、内部パラメータツール を選択して 内部パラメータツール ウィンドウを開きます。
-
キャリブレーションボードを配置して画像の品質をチェックする の 画像をキャプチャ をクリックしてキャリブレーションボードの 2D 画像と深度画像を取得します。画像が要件を満たすかを確認します。画像が要件を満たしているか確認します。
-
キャリブレーションボードの型番を選択する でキャリブレーションボードの型番を設定します。右側の小さな三角形をクリックして、キャリブレーションボードの型番を選択します。
-
内部パラメータをチェック の 内部パラメータをチェック をクリックして、内部パラメータをチェックします。チェックが完了するとチェックの結果が表示されます。
-
内部パラメータの検査結果 ダイアログボックスに スカラー差 の値(パーセント)を確認します。
|
内部パラメータのチェック基準
3D ロボットビジョンソリューションの場合、V4シリーズのカメラの内部パラメータの合格基準は下表の通りです。
| 型番 | 焦点距離(mm) | キャリブレーションボードからカメラまでの距離(mm) | 使用するキャリブレーションボードの型番 | 合格基準 |
|---|---|---|---|---|
UHP-140 |
300 |
300 |
OCB-5 |
スカラー差<0.4% |
NANO |
350 |
350 |
CGB-20 |
スカラー差<0.4% |
550 |
550 |
CGB-20 |
スカラー差<0.6% |
|
PRO S |
500 |
500 |
CGB-20 |
スカラー差<0.6% |
700 |
700 |
CGB-20 |
スカラー差<0.8% |
|
1000 |
1000 |
CGB-35 |
スカラー差<1.0% |
|
PRO M |
1200 |
1200 |
CGB-35 |
スカラー差<1.2% |
2000 |
2000 |
CGB-50 |
スカラー差<2.0% |
|
LSR S |
800 |
800 |
CGB-35 |
スカラー差<0.8% |
1400 |
1400 |
CGB-50 |
スカラー差<1.4% |
|
LSR L |
1500 |
1500 |
CGB-50 |
スカラー差<1.6% |
3000 |
2800 |
CGB-50 |
スカラー差<2.8% |
|
DEEP |
3000 |
2800 |
CGB-50 |
スカラー差<2.8% |
3Dロボットビジョンソリューションの場合、V3カメラの内部パラメータの合格基準は下表の通りです。
| 型番 | 焦点距離(mm) | キャリブレーションボードからカメラまでの距離(mm) | 使用するキャリブレーションボードの型番 | 合格基準 |
|---|---|---|---|---|
Nano |
350 |
350 |
CGB-20 |
スカラー差<0.4% |
550 |
550 |
CGB-20 |
スカラー差<0.6% |
|
Log S |
700 |
700 |
CGB-20/BDB-5 |
スカラー差<0.8% |
1000 |
1000 |
CGB-35/BDB-6 |
スカラー差<1.0% |
|
Log M |
1200 |
1200 |
CGB-35/BDB-6 |
スカラー差<1.2% |
2000 |
2000 |
CGB-50/BDB-7 |
スカラー差<2.0% |
|
Pro S Enhanced |
500 |
550 |
CGB-20 |
スカラー差<0.6% |
700 |
700 |
CGB-20 |
スカラー差<0.8% |
|
1000 |
1000 |
CGB-35 |
スカラー差<1.0% |
|
Pro M Enhanced |
1200 |
1200 |
CGB-35 |
スカラー差<1.2% |
2000 |
2000 |
CGB-50 |
スカラー差<2.0% |
|
Pro XS |
350 |
350 |
CGB-20 |
スカラー差<0.4% |
550 |
550 |
CGB-20 |
スカラー差<0.6% |
|
Deep |
3000 |
2800 |
CGB-50 |
スカラー差<2.8% |
Pro L Enhanced |
1500 |
1500 |
CGB-50 |
スカラー差<1.6% |
3000 |
2800 |
CGB-50 |
スカラー差<2.8% |
|
Laser L Enhanced |
1500 |
1500 |
CGB-50 |
スカラー差<1.6% |
3000 |
2800 |
CGB-50 |
スカラー差<2.8% |
|
Laser L V3S |
3000 |
2800 |
CGB-50 |
スカラー差<2.8% |
内部パラメータの検査結果 ダイアログでの スカラー差 が合格基準を満たしている場合、カメラの内部パラメータチェックに合格し、カメラは使用可能です。
スカラー差 が合格基準のしきい値を超える場合、内部パラメータのチェックは失敗し、内部パラメータを補正する必要があります。詳細な手順は以下の通りです。
内部パラメータを補正
内部パラメータ修正 機能を使用するとき、以下のようにキャリブレーションボードを配置してください。
-
キャリブレーションボードをカメラ光軸に垂直するようにします。
-
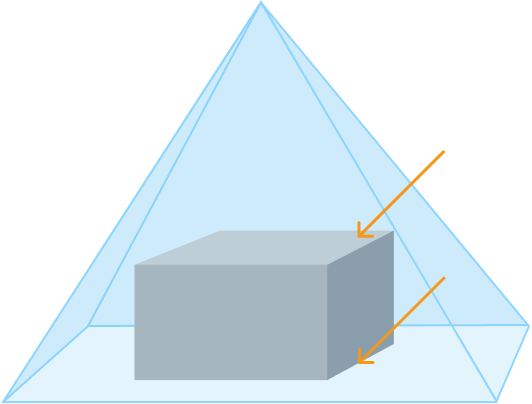
以下の高さに配置します。
-
対象物の上表面
-
対象物の底面
例えば:コンテナからのピッキング、またはデパレタイジング・パレタイジングの現場では、キャリブレーションボードをコンテナやパレットの上表面および底面に配置する必要があります。
-
-
上記の2つの位置で、それぞれキャリブレーションボードが対象物の中心と4つのコーナーにある5セットのデータを取得します。
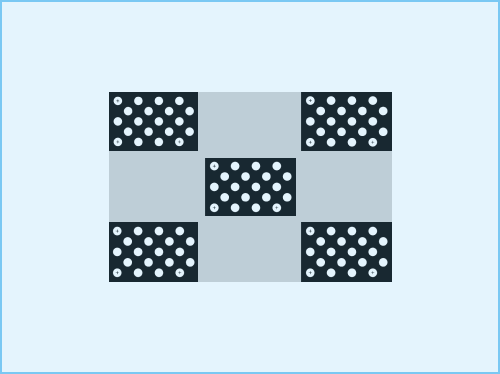
 :カメラ視野
:カメラ視野 :対象物
:対象物 -
対象物の寸法がカメラの最大視野とほぼ同じ場合は、キャリブレーションボードを視野の端に配置しないでください。キャリブレーションボードの端とカメラ視野の端との間隔が視野の横/縦の5分の1以上にしてください。
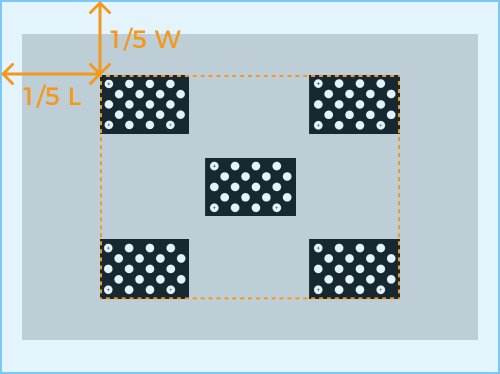 :カメラ視野:対象物
:カメラ視野:対象物
内部パラメータを補正するには、以下の手順を実行してください。
-
Mech-Eye Viewerのメニューバーから ツール をクリックし、内部パラメータツール を選択します。内部パラメータツール ウィンドウが開いたら、内部パラメータを修正 にチェックを入れます。
-
上記の要件に従ってキャリブレーションボードを配置します。
-
キャリブレーションボードを1つの領域に配置した後、データを取得 をクリックします。
-
キャリブレーションボードを移動してからもう一度 データを取得 をクリックします。
-
以上のようにデータを10セット取得した後、内部パラメータを修正 をクリックします。しばらくするとチェックの結果のウィンドウが自動的に表示されます。
内部パラメータを正常に補正できない場合は、テクニカルサポートにお問い合わせください。
| UHP シリーズは、内部パラメータ修正 機能を使用できません。内部パラメータの誤差が大きい場合、テクニカルサポートにお問い合わせください。 |