Déploiement de la solution
Cette section présente le déploiement de la solution de vision pour les billettes d’acier rondes. Le processus global est montré dans la figure ci-dessous.
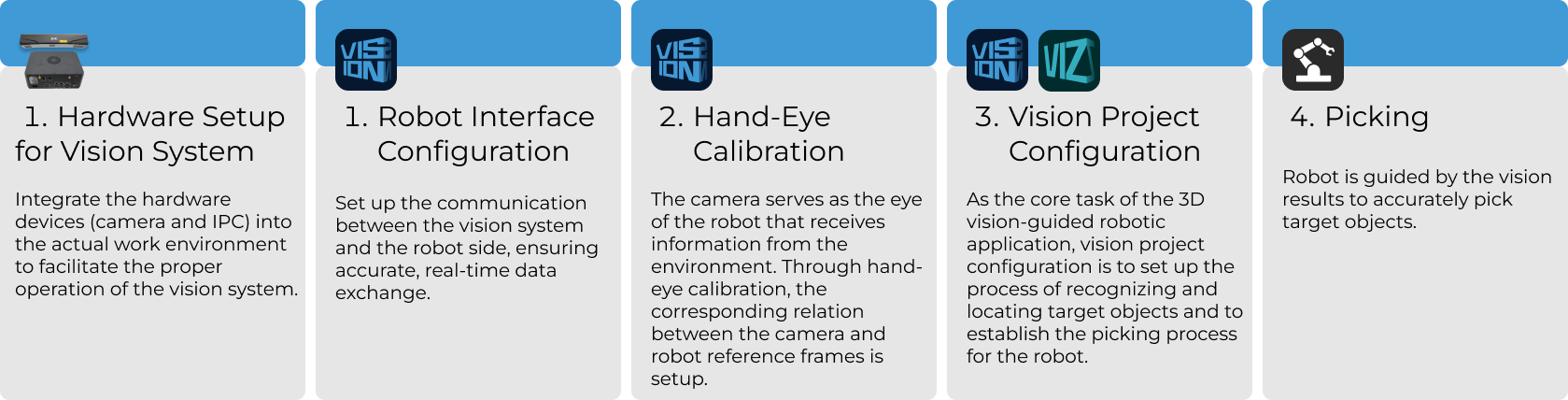
Configuration matérielle du système de vision
La configuration matérielle du système de vision consiste à intégrer le matériel (caméra et PC industriel) dans l’environnement réel afin de prendre en charge le fonctionnement normal du système de vision.
Dans cette phase, vous devez installer et configurer le matériel du système de vision. Pour plus de détails, reportez-vous à Configuration matérielle du système de vision.
Configuration de la communication du robot
Avant la configuration de la communication du robot, il est nécessaire d’obtenir d’abord la solution. Cliquez ici pour voir comment obtenir la solution.
-
Ouvrez Mech-Vision.
-
Dans l’interface d’accueil de Mech-Vision, cliquez sur Créer à partir de la bibliothèque de solutions pour ouvrir la bibliothèque de solutions.
-
Entrez dans la catégorie Cas typiques de la bibliothèque de solutions, cliquez sur l’icône
 dans le coin supérieur droit pour plus de ressources, puis cliquez sur le bouton Confirmer dans la fenêtre contextuelle.
dans le coin supérieur droit pour plus de ressources, puis cliquez sur le bouton Confirmer dans la fenêtre contextuelle. -
Après avoir acquis les ressources de la solution, sélectionnez la solution Billettes d’acier rondes dans la catégorie Prise de pièces empilées aléatoirement, renseignez le Nom de la solution et le Chemin en bas, puis cliquez sur le bouton Créer. Ensuite, cliquez sur le bouton Confirmer dans la fenêtre contextuelle pour télécharger la solution Billettes d’acier rondes.
Une fois la solution téléchargée, elle sera automatiquement ouverte dans Mech-Vision.
Avant de déployer une solution de vision, vous devez configurer la communication entre le Mech-Mind Vision System et le côté robot (robot, PLC ou ordinateur hôte).
La solution Billettes d’acier rondes utilise la communication par Interface standard. Pour des instructions détaillées, veuillez vous référer à Configuration de la communication de l’Interface standard.
Calibration main-œil
La calibration main-œil établit la relation de transformation entre les repères de la caméra et du robot. Grâce à cette relation, la pose de l’objet déterminée par le système de vision peut être transformée dans le repère du robot, ce qui guide le robot dans l’exécution de ses tâches.
Veuillez vous référer à Guide de calibration main-œil du robot et compléter la calibration main-œil.
|
Chaque fois que la caméra est montée, ou lorsque la position relative de la caméra et du robot change après la calibration, il est nécessaire de réaliser de nouveau la calibration main-œil. |
Configuration du projet de vision
Après avoir réalisé la configuration de la communication et la calibration main-œil, vous pouvez utiliser Mech-Vision pour configurer le projet de vision.
Le processus de configuration d’un projet de vision est montré dans la figure ci-dessous.
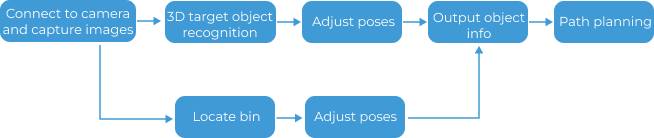
Se connecter à la caméra et capturer des images
-
Connectez-vous à la caméra.
Ouvrez Mech-Eye Viewer, trouvez la caméra à connecter et cliquez sur le bouton Se connecter.
-
Ajustez les paramètres de la caméra.
Pour garantir que l’image 2D capturée est nette et que le nuage de points est intact, vous devez ajuster les paramètres de la caméra. Pour des instructions détaillées, veuillez vous référer à LSR L-GL Référence des paramètres de la caméra.
-
Capturez des images.
Après que la caméra est connectée avec succès et que le groupe de paramètres est défini, vous pouvez commencer à capturer des images de l’objet cible. Cliquez sur le bouton
 en haut pour capturer une image unique. À ce moment, vous pouvez visualiser l’image 2D et le nuage de points capturés de l’objet cible. Assurez-vous que l’image 2D est nette, que le nuage de points est intact et que les bords sont clairs. L’image 2D et le nuage de points conformes de l’objet cible sont montrés respectivement à gauche et à droite dans la figure ci-dessous.
en haut pour capturer une image unique. À ce moment, vous pouvez visualiser l’image 2D et le nuage de points capturés de l’objet cible. Assurez-vous que l’image 2D est nette, que le nuage de points est intact et que les bords sont clairs. L’image 2D et le nuage de points conformes de l’objet cible sont montrés respectivement à gauche et à droite dans la figure ci-dessous.
-
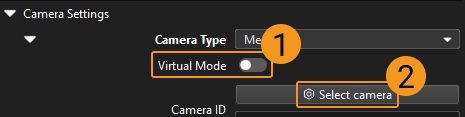
Connectez-vous à la caméra dans Mech-Vision.
Sélectionnez l’étape Capturer des images depuis la caméra, désactivez l’option Mode virtuel et cliquez sur le bouton Sélectionner la caméra.
Dans la fenêtre contextuelle, cliquez sur l’icône
 à droite du numéro de série de la caméra. Lorsque l’icône devient
à droite du numéro de série de la caméra. Lorsque l’icône devient  , la caméra est connectée avec succès. Après la connexion réussie de la caméra, vous pouvez sélectionner le groupe de paramètres d’étalonnage de la caméra dans la liste déroulante à droite, comme montré ci-dessous.
, la caméra est connectée avec succès. Après la connexion réussie de la caméra, vous pouvez sélectionner le groupe de paramètres d’étalonnage de la caméra dans la liste déroulante à droite, comme montré ci-dessous.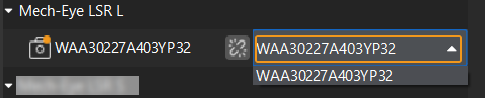
Maintenant que vous êtes connecté à la caméra réelle, vous n’avez pas besoin d’ajuster d’autres paramètres. Cliquez sur l’icône
 sur l’étape Capturer des images depuis la caméra pour exécuter l’étape. S’il n’y a pas d’erreur, la caméra est connectée avec succès et les images peuvent être capturées correctement.
sur l’étape Capturer des images depuis la caméra pour exécuter l’étape. S’il n’y a pas d’erreur, la caméra est connectée avec succès et les images peuvent être capturées correctement.
Reconnaissance 3D de l’objet cible (pour reconnaître l’objet cible)
Cette solution utilise l’étape Reconnaissance 3D de l’objet cible pour reconnaître les objets cibles. Cliquez sur le bouton Assistant de configuration dans le panneau Paramètres de l’étape Reconnaissance 3D de l’objet cible pour ouvrir l’outil Reconnaissance 3D de l’objet cible afin de configurer les paramètres correspondants. Le processus de configuration global est montré dans la figure ci-dessous.

Prétraitement du nuage de points
Avant le prétraitement du nuage de points, vous devez prétraiter les données en ajustant les paramètres pour rendre le nuage de points original plus clair, améliorant ainsi la précision et l’efficacité de la reconnaissance.
-
Définir la région de reconnaissance.
Définissez une zone de reconnaissance efficace afin d’écarter les facteurs d’interférence et d’améliorer l’efficacité de la reconnaissance.
-
Définissez les paramètres Effet d’extraction des arêtes, Niveau de suppression du bruit et Filtre de points pour supprimer le bruit.
Après le prétraitement du nuage de points, cliquez sur le bouton Exécuter l’étape.

Reconnaître l’objet cible
Après le prétraitement du nuage de points, vous devez créer un modèle de nuage de points pour l’objet cible dans l'Éditeur d’objet cible, puis définir des paramètres d’appariement dans l’outil Reconnaissance 3D de l’objet cible pour l’appariement du modèle de nuage de points.
-
Créer un modèle d’objet cible.
Cliquez sur le bouton Ouvrir l’éditeur d’objet cible pour ouvrir l’éditeur, importez le fichier STL pour générer un modèle de nuage de points pour l’objet cible.
-
Définir les paramètres liés à la reconnaissance d’objet.
-
Activez le Mode avancé sur le côté droit de Reconnaître l’objet cible.
-
Mode d’appariement : activez Définir automatiquement le mode de correspondance. Une fois activée, cette étape ajustera automatiquement les paramètres sous Paramètres d’appariement grossier et Paramètres d’appariement fin.
-
Appariement ultra-fin : Activer l’appariement ultra-fin pour effectuer un second appariement fin avec le modèle de surface sur le résultat d’appariement, améliorant la précision de la prise dans la direction Z.
-
Paramètres de confiance : définissez Stratégie de confiance sur Manuel, Stratégie de score combiné sur Prendre en compte la surface et le bord, et définissez Seuil de confiance de l’appariement de surface sur une valeur élevée, telle que 0,8, afin de supprimer les résultats d’appariement incorrects.
-
Sortie—Nombre maximal de sorties : minimisez le nombre de sorties pour réduire le temps d’appariement, tout en garantissant que les exigences de planification de trajectoire sont satisfaites. Dans cette solution, le paramètre Nombre maximal de sorties est défini sur 15.
-
Supprimer les poses coïncidentes et supprimer les poses superposées : pour éliminer les résultats de reconnaissance coïncidents et superposés, activez les options Supprimer les poses des objets coïncidents et Supprimer les poses des objets superposés, et définissez leurs seuils respectifs sur 30% et 20%.
-
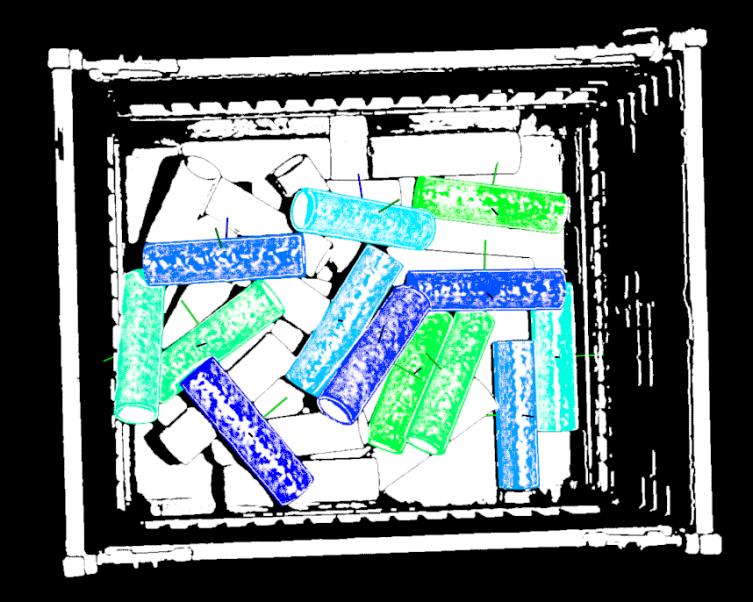
Après avoir défini les paramètres ci-dessus, cliquez sur le bouton Exécuter l’étape. Le résultat d’appariement est montré dans la figure ci-dessous.
Configurer les ports de l’étape
Après la reconnaissance de l’objet cible, les ports de l’étape doivent être configurés pour fournir les résultats de vision et les nuages de points à Mech-Viz pour la planification de trajectoire et la détection de collisions.
Pour garantir que les objets peuvent être correctement saisis par le robot, vous devez ajuster le point central de l’objet afin que son axe Z pointe vers le haut. Sous Sélectionner le port, sélectionnez Port(s) lié(s) au point central de l’objet, et sélectionnez l’option Nuage de points prétraité. Cliquez ensuite sur le bouton Enregistrer. De nouveaux ports de sortie seront ajoutés à l’étape Reconnaissance 3D de l’objet cible après ces réglages.
Reconnaissance 3D de l’objet cible (pour reconnaître le bac)
Cette solution utilise l’étape Reconnaissance 3D de l’objet cible pour reconnaître le bac. Cliquez sur le bouton Assistant de configuration dans le panneau Paramètres de l’étape Reconnaissance 3D de l’objet cible pour ouvrir l’outil Reconnaissance 3D de l’objet cible afin de configurer les paramètres correspondants. Le processus de configuration global est montré dans la figure ci-dessous.
Prétraitement du nuage de points
Avant le prétraitement du nuage de points, vous devez prétraiter les données en ajustant les paramètres pour rendre le nuage de points original plus clair, améliorant ainsi la précision et l’efficacité de la reconnaissance.
-
Définir la région de reconnaissance.
Définissez une zone de reconnaissance efficace afin d’écarter les facteurs d’interférence et d’améliorer l’efficacité de la reconnaissance.
-
Définissez les paramètres Effet d’extraction des arêtes, Niveau de suppression du bruit et Filtre de points pour supprimer le bruit.
Après le prétraitement du nuage de points, cliquez sur le bouton Exécuter l’étape.

Reconnaître l’objet cible
Après le prétraitement du nuage de points, vous devez créer un modèle de nuage de points pour le bac dans l'Éditeur d’objet cible, puis définir des paramètres d’appariement dans l’outil Reconnaissance 3D de l’objet cible pour l’appariement du modèle de nuage de points.
-
Créer un modèle d’objet cible.
Créer le modèle de nuage de points et ajouter le point de préhension. Cliquez sur le bouton Ouvrir l’éditeur d’objet cible pour ouvrir l’éditeur, générez un modèle de nuage de points basé sur le nuage de points acquis par la caméra.
-
Définir les paramètres liés à la reconnaissance d’objet.
-
Mode d’appariement : activez Définir automatiquement le mode de correspondance.
-
Paramètres de confiance : définissez le Seuil de confiance à 0,7 pour supprimer les résultats d’appariement incorrects.
-
Sortie—Nombre maximal de sorties : comme l’objet cible est un bac, définissez Nombre maximal de sorties sur 1.
-
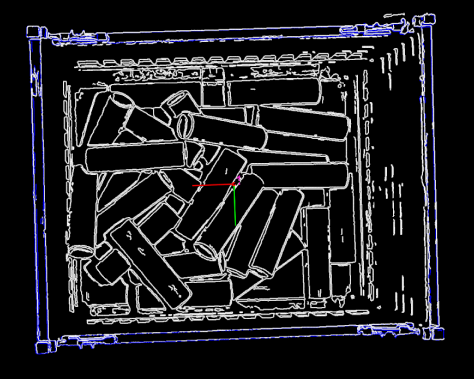
Après avoir défini les paramètres ci-dessus, cliquez sur le bouton Exécuter l’étape. Le résultat d’appariement est montré dans la figure ci-dessous.
Configurer les ports de l’étape
Après la reconnaissance de l’objet cible, les ports de l’étape doivent être configurés pour fournir les résultats de vision et les nuages de points à Mech-Viz pour la planification de trajectoire et la détection de collisions.
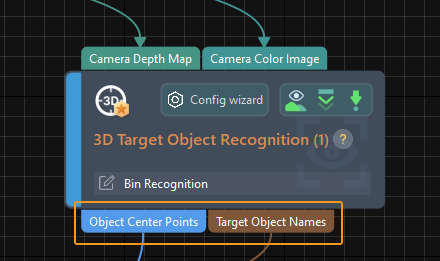
Pour obtenir les informations de position du bac réel, sélectionnez l’option Port(s) lié(s) au point central de l’objet sous Sélectionner le port, et cliquez sur le bouton Enregistrer. De nouveaux ports de sortie sont ajoutés à l’étape Reconnaissance 3D de l’objet cible, comme montré ci-dessous.
Ajuster les poses (poses de l’objet cible)
Après avoir obtenu les poses de l’objet cible, vous devez utiliser l’étape Ajuster les poses V2 pour ajuster les poses. Cliquez sur le bouton Assistant de configuration dans le panneau Paramètres de l’étape Ajuster les poses V2 pour ouvrir l’outil ajustement des poses pour la configuration de l’ajustement des poses. Le processus de configuration global est montré dans la figure ci-dessous.

-
Pour sortir les poses de l’objet cible dans le repère du robot, veuillez cocher la case devant Transformer la pose dans le repère du robot pour transformer les poses du repère de la caméra vers le repère du robot.
-
Ajuster les orientations des poses.
Définissez Orientation sur Pointer vers le point de référence et Axe de pointage sur axe Z, ce qui permet au robot de saisir les objets cibles dans la direction spécifiée pour éviter les collisions.
-
Définissez le Type de tri sur Trier par valeur X/Y/Z de la pose, définissez la Valeur spécifiée de la pose sur Coordonnée Z, et triez les poses dans l’ordre Décroissant.
-
Pour réduire le temps nécessaire à la planification de trajectoire ultérieure, les objets cibles qui ne peuvent pas être facilement saisis doivent être filtrés en fonction de l’angle entre l’axe Z de la pose et la direction de référence. Dans ce tutoriel, vous devez définir la Différence angulaire maximale à 90°.
-
Paramètres généraux.
Définissez le nombre de nouveaux ports sur 1, et un nouveau port d’entrée et de sortie sera ajouté à l’étape. Connectez le port d’entrée au port de sortie Noms d’objets cibles de l’étape Reconnaissance 3D de l’objet cible et connectez le port de sortie à l’étape Sortie.
Ajuster les poses (poses du bac)
Après avoir obtenu la pose du bac, vous devez utiliser l’étape Ajuster les poses V2 pour ajuster la pose. Cliquez sur le bouton Assistant de configuration dans le panneau Paramètres de l’étape Ajuster les poses V2 pour ouvrir l'outil d’ajustement des poses pour la configuration de l’ajustement des poses. Le processus de configuration global est montré dans la figure ci-dessous.

-
Sélectionner la stratégie de traitement des poses.
Comme l’objet cible est un bac profond contenant des objets cibles, veuillez sélectionner l’option Bac.
-
Pour sortir la pose du bac dans le repère du robot, veuillez cocher la case devant Transformer la pose dans le repère du robot pour transformer la pose du repère de la caméra vers le repère du robot.
-
Translater les poses suivant une direction spécifiée.
Dans le repère du robot, déplacez la pose du bac le long de la direction Z positive et ajustez manuellement la Distance de translation à -285 mm pour déplacer la pose du bac depuis la surface supérieure du bac vers le centre du bac, qui sera utilisé ultérieurement pour mettre à jour le modèle de collision du bac dans Mech-Viz.
Distance de translation = -1 × 1/2 hauteur du bac -
Pour réduire le temps nécessaire à la planification de trajectoire ultérieure, les objets cibles qui ne peuvent pas être facilement saisis doivent être filtrés en fonction de l’angle entre l’axe Z de la pose et la direction de référence. Dans ce tutoriel, vous devez définir la Différence angulaire maximale à 90°.
-
Paramètres généraux.
Définissez le nombre de nouveaux ports sur 1, et un nouveau port d’entrée et de sortie sera ajouté à l’étape. Connectez le port d’entrée au port de sortie Noms d’objets cibles de l’étape Reconnaissance 3D de l’objet cible et connectez le port de sortie à l’étape Sortie.
Sortir les informations de l’objet
Utilisez l’étape Sortie pour envoyer le point central de l’objet, le nuage de points prétraité, le nom de l’objet cible, le nom du bac, la pose du bac, etc., à Mech-Viz pour la planification de trajectoire.
Planification de trajectoire
Une fois la reconnaissance de l’objet cible terminée, vous pouvez utiliser Mech-Viz pour planifier une trajectoire puis écrire un programme robot pour la prise des objets cibles.
Le processus de configuration de la planification de trajectoire est montré dans la figure ci-dessous.

Configurer les objets de scène
Les objets de scène sont introduits pour rendre la scène dans le logiciel plus proche du scénario réel, ce qui facilite la planification de trajectoire du robot. Pour des instructions détaillées, veuillez vous référer à Configurer les objets de scène.
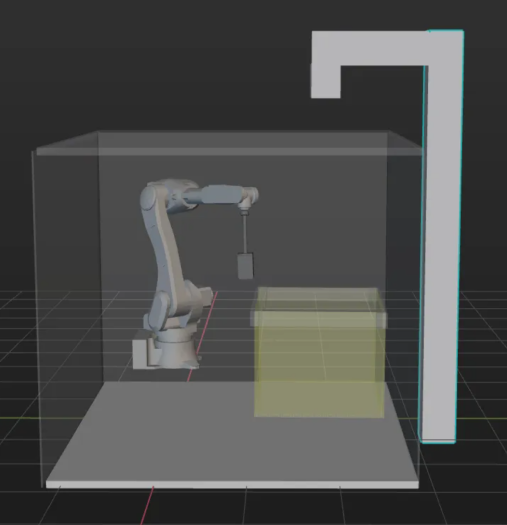
Pour garantir une prise efficace, les objets de scène doivent être configurés de manière à représenter précisément l’environnement opérationnel réel. Les objets de scène dans cette solution sont configurés comme montré ci-dessous.
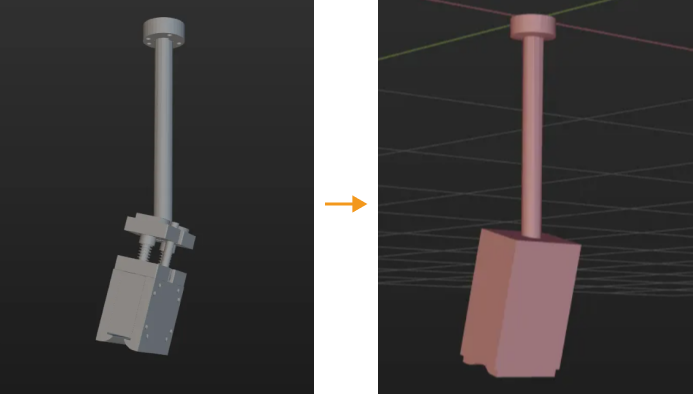
Configurer l’outil du robot
L’outil terminal doit être configuré afin que son modèle puisse être affiché dans la zone de simulation 3D et utilisé pour la détection de collisions. Pour des instructions détaillées, veuillez vous référer à Configurer l’outil.
|
Ajuster le flux de travail
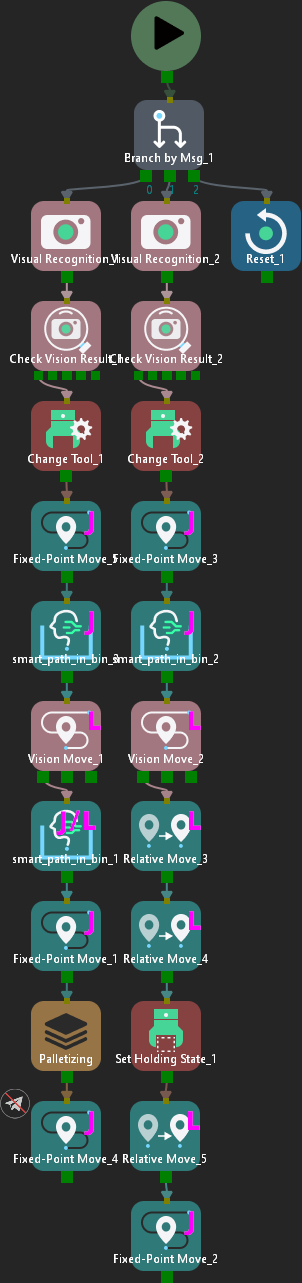
Le flux de travail se réfère au programme de contrôle des mouvements du robot créé dans Mech-Viz sous forme d’organigramme. Après la configuration des objets de scène et des outils terminaux, vous pouvez ajuster le flux de travail du projet en fonction des besoins réels. L’organigramme du traitement logique lors de la prise de l’objet cible est montré ci-dessous.
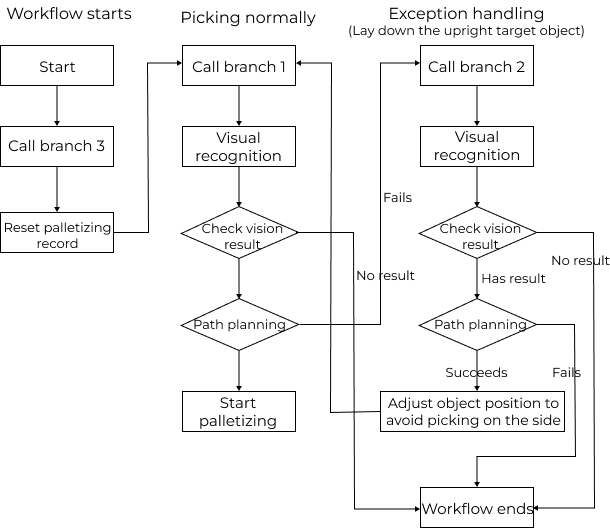
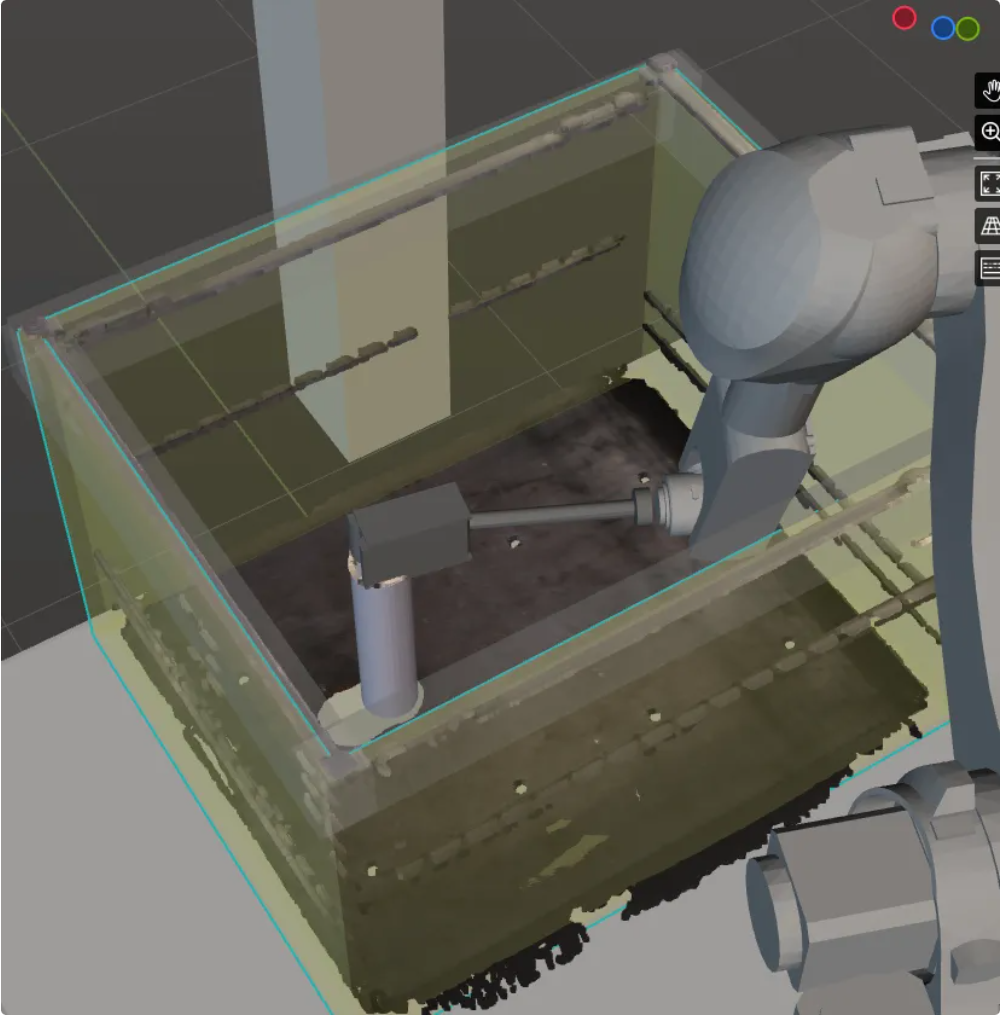
Un exemple de prise réussie du robot est présenté ci-dessous :

La méthode de prise anormale (prise par les extrémités de l’objet cible) est illustrée ci-dessous :
Lorsque la communication par Interface standard est utilisée, le flux de travail du projet est montré ci-dessous.
Simuler et tester
Cliquez sur le bouton Simuler dans la barre d’outils pour tester si le système de vision est correctement configuré en simulant le projet Mech-Viz.
Placez l’objet cible de manière aléatoire dans le bac et cliquez sur Simuler dans la barre d’outils de Mech-Viz pour simuler la prise de l’objet cible. Après chaque prise réussie, l’objet cible doit être réorganisé, et 10 tests de simulation doivent être effectués. Si les 10 simulations aboutissent toutes à des prises réussies, le système de vision est configuré avec succès.
En cas d’anomalie pendant la simulation, reportez-vous à FAQ de déploiement de la solution pour résoudre le problème.
Prise et dépose par robot
Écrire un programme robot
Si le résultat de la simulation répond aux attentes, vous pouvez écrire un programme de prise et de dépose pour le robot Kawasaki.
Le programme d’exemple Programmes d’exemple Kawasaki pour la prise peut essentiellement répondre aux exigences de ce cas typique. Vous pouvez modifier le programme d’exemple. Pour une explication détaillée des programmes d’exemple Kawasaki pour la prise, veuillez vous référer à Explication du programme d’exemple.
Instruction de modification
Sur la base du programme d’exemple, veuillez modifier les fichiers du programme en suivant les étapes suivantes :
-
Définir le TCP.
Avant modification Après modification (exemple) TOOL gripper ;set TCP
point tcp1 = trans(0,37.517,390.13,-15,0,0) TOOL tcp1 ;set TCP
-
Définissez le port DO pour ajouter une logique de contrôle d’outil afin d’initialiser l’état de l’outil.
Avant modification Après modification (exemple) /
signal 10,-9;set do off
-
Spécifier l’adresse IP et le numéro de port de l’IPC. Changez l’adresse IP et le numéro de port dans la commande MM_Init_Socket pour ceux du système de vision.
Avant modification Après modification (exemple) ;Set ip address of IPC call mm_init_skt(127,0,0,1,50000)
;Set ip address of IPC call mm_init_skt(128,1,1,2,60000)
-
Déclenchez l’exécution du projet Mech-Viz, basculez vers la branche 3 pour réinitialiser les enregistrements de palettisation, puis basculez vers la branche 1 pour démarrer la reconnaissance visuelle. Ensuite, déterminez si la branche 2 doit être utilisée pour la reconnaissance visuelle en fonction du code d’état indiquant si la trajectoire planifiée est obtenue avec succès deMech-Viz.
Avant modification Après modification ;Run Viz project call mm_start_viz(1,#start_viz) ;(2,#start_viz) used for ETH viz initial position twait 0.1 ;set branch exitport ;call mm_set_branch(1,1) ;get planned path call mm_get_vizdata(2,pos_num,vispos_num,ret1)
;Init Palletizing CALL mm_start_viz(2,#start_viz);(2,#start_viz) used for ETH viz initial position TWAIT 0.1 call mm_set_branch(7,3);init Palletizing TWAIT 0.1 CALL mm_start_viz(2,#start_viz);(2,#start_viz) used for ETH viz initial position TWAIT 0.1 call mm_set_branch(7,1) 10 flag =1 CALL mm_get_vizdata(1,pos_num,vispos_num,ret1) IF ret1<>2100 THEN CALL mm_start_viz(2,#start_viz);(2,#start_viz) used for ETH viz initial position TWAIT 0.1 call mm_set_branch(7,2) flag =2 CALL mm_get_vizdata(1,pos_num,vispos_num,ret1) -
Après avoir obtenu le code d’état 2100 (qui indique que la trajectoire planifiée est obtenue avec succès à partir de Mech-Viz), déplacez le robot vers la position d’acquisition d’images enseignée.
Avant modification Après modification (exemple) /
JMOVE #camera_capture;move to camera_capture position
-
Déplacez le robot le long de la trajectoire planifiée vers le point de prise, et définissez le port DO pour ajouter un signal afin de fermer la pince et saisir l’objet cible.
Avant modification Après modification (exemple) ;follow the planned path to pick for count =1 to pos_num speed speed[count] LMOVE movepoint[count] if count == vispos_num then ;add object grasping logic here;follow the planned path to pick JMOVE #movepoint[1] JMOVE #movepoint[2] JMOVE #movepoint[3] JMOVE #movepoint[4] LMOVE #movepoint[5] BREAK signal 9,-10;set do on TWAIT 0.2 LMOVE #movepoint[6] LMOVE #movepoint[7]
-
Déterminez l’étape suivante en fonction du résultat du drapeau. Lorsque flag = 2, déposez l’objet cible actuellement tenu, sinon poursuivez le processus normal de dépose.
Avant modification Après modification /
IF flag ==2 then break signal 10,-9;set do off twait 0.2 JMOVE #movepoint[8] JMOVE #movepoint[9] TWAIT 2 ELSE JMOVE #movepoint[8] end CALL mm_start_viz(2,#start_viz);(2,#start_viz) used for ETH viz initial position TWAIT 0.1 call mm_set_branch(7,1) ;go to drop location if flag ==1 then JMOVE #movepoint[9] JMOVE #movepoint[10] break signal 10,-9 twait 0.2 JMOVE #movepoint[11] end -
Définissez le port DO pour effectuer la dépose. Notez que la commande DO doit être définie en fonction du numéro de port DO réellement utilisé sur site.
Avant modification Après modification (exemple) ;add object releasing logic here
signal 10,-9;set do on
-
Insérez l’instruction de boucle pour un cycle de prise et de dépose.
Avant modification Après modification (exemple) /
JMOVE #camera_capture;move to camera_capture position GOTO 10
Référence : programme d’exemple modifié
.PROGRAM vision_sample_2()
;----------------------------------------------------------
;* FUNCTION:simple pick and place with Mech-Viz
;* mechmind
;----------------------------------------------------------
accuracy 1 always
speed 30 always
point tcp1 = trans(0,37.517,390.13,-15,0,0)
TOOL tcp1 ;set TCP
signal 10,-9;set do off
Home ;move robot home position
JMOVE camera_capture ;move to camera_capture position
break
pos_num = 0
;Set ip address of IPC
call mm_init_skt(128,1,1,2,60000)
twait 0.1
;Set vision recipe
;call mm_switch_model(1,1)
;Init Palletizing
CALL mm_start_viz(2,#start_viz);(2,#start_viz) used for ETH viz initial position
TWAIT 0.1
call mm_set_branch(7,3);init Palletizing
TWAIT 0.1
CALL mm_start_viz(2,#start_viz);(2,#start_viz) used for ETH viz initial position
TWAIT 0.1
call mm_set_branch(7,1)
10 flag =1
CALL mm_get_vizdata(1,pos_num,vispos_num,ret1)
IF ret1<>2100 THEN
CALL mm_start_viz(2,#start_viz);(2,#start_viz) used for ETH viz initial position
TWAIT 0.1
call mm_set_branch(7,2)
flag =2
CALL mm_get_vizdata(1,pos_num,vispos_num,ret1)
if ret1 <> 2100
JMOVE #camera_capture;move to camera_capture position
end
for count=1 to pos_num
call mm_get_pose(count,&movepoint[count],label[count],speed[count])
end
;follow the planned path to pick
JMOVE #movepoint[1]
JMOVE #movepoint[2]
JMOVE #movepoint[3]
JMOVE #movepoint[4]
LMOVE #movepoint[5]
BREAK
signal 9,-10;set do on
TWAIT 0.2
LMOVE #movepoint[6]
LMOVE #movepoint[7]
IF flag ==2 then
break
signal 10,-9;set do off
twait 0.2
JMOVE #movepoint[8]
JMOVE #movepoint[9]
TWAIT 2
ELSE
JMOVE #movepoint[8]
end
CALL mm_start_viz(2,#start_viz);(2,#start_viz) used for ETH viz initial position
TWAIT 0.1
call mm_set_branch(7,1)
;go to drop location
if flag ==1 then
JMOVE #movepoint[9]
JMOVE #movepoint[10]
break
twait 0.2
JMOVE #movepoint[11]
end
signal 10,-9;set do on
JMOVE #camera_capture;move to camera_capture position
GOTO 10
ENDTest de prise
Pour garantir une production stable dans le scénario réel, le programme d’exemple modifié doit être exécuté pour effectuer un test de prise avec le robot. Pour des instructions détaillées, veuillez vous référer à Tester la communication de l’Interface standard.
Avant d’effectuer le test de prise, veuillez enseigner les waypoints suivants.
| Nom | Variable | Description |
|---|---|---|
Point central de l’outil |
TCP |
Défini par la variable de pose « gripper ». Veuillez utiliser le boîtier d’enseignement pour l’enseigner. |
Position Home |
home |
La position initiale enseignée. La position initiale doit être éloignée des objets à saisir et des dispositifs environnants, et ne doit pas obstruer le champ de vision de la caméra. |
Position de capture d’images |
camera_capture |
La position d’acquisition d’images enseignée. La position de capture d’images se réfère à la position du robot où la caméra capture des images. À cette position, le bras du robot ne doit pas obstruer le champ de vision de la caméra. |
Waypoint intermédiaire |
movepoint[8] |
L’ajout de waypoints intermédiaires peut assurer des mouvements robotisés fluides et éviter des collisions inutiles. |
Waypoint de dépose |
movepoint[11] |
La position pour déposer l’objet cible. |
Après l’enseignement, disposez les objets cibles comme montré dans le tableau ci-dessous, et utilisez le robot pour réaliser des tests de prise pour toutes les dispositions à faible vitesse.
Les tests de prise peuvent être divisés en trois phases :
Phase 1 : Test avec un objet cible unique
État de placement de l’objet |
Illustration |
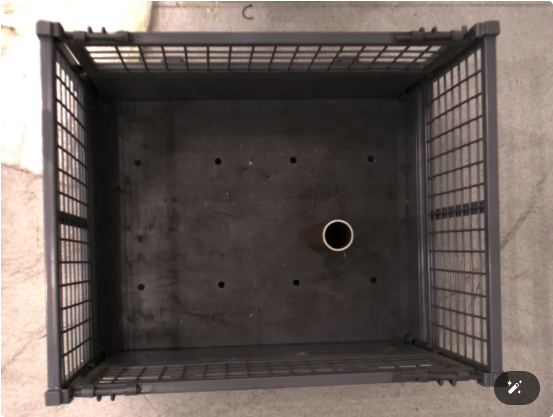
Objet cible placé dans le sens gauche-droite au milieu du bac |

|
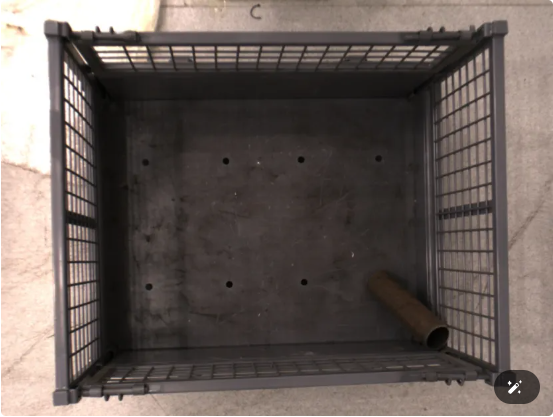
Objet cible placé dans le sens haut-bas au milieu du bac |

|
Objet cible placé verticalement au milieu du bac |
|
L’objet cible est placé dans un coin du bac |

|
Phase 2 : Test d’interférence avec des objets cibles voisins
État de placement de l’objet |
Illustration |
Objets cibles ajustés étroitement par leurs surfaces courbes l’une contre l’autre au milieu du bac |

|
Objets cibles placés au milieu du bac, avec leurs extrémités étroitement alignées |

|
Phase 3 : Test en scénario réel
État de placement de l’objet |
Illustration |
Similaire au scénario réel, les objets cibles sont empilés aléatoirement. |

|
Si le robot saisit avec succès l’objet ou les objets cibles dans les scénarios de test ci-dessus, le système de vision peut être considéré comme déployé avec succès.