Notions de base
Cette section présente les informations de base relatives à la solution Long Sheet Metal Parts, y compris son applicabilité, ses avantages, ses spécifications techniques, etc.
Applicabilité
Le tableau ci-dessous présente l’applicabilité de cette solution en termes de types d’objets, de matériaux des objets, de disposition, de supports, etc.
| Faisable | Illustration | |
|---|---|---|
Type d’objet |
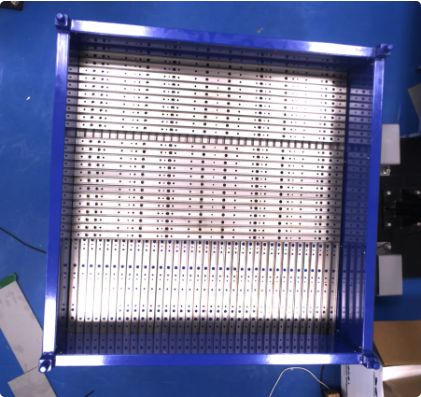
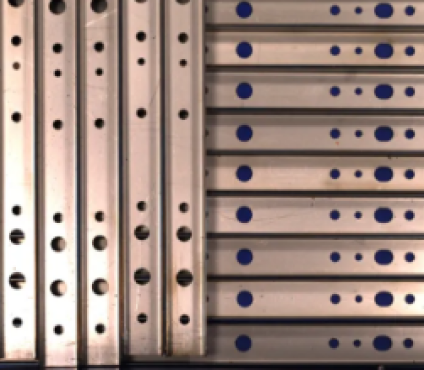
Pièces longues en tôle |
|
Matériau de l’objet |
Très réfléchissant |
|
Disposition |
Disposés de manière ordonnée. Les objets cibles peuvent pivoter dans un plan mais ne peuvent pas être placés sur le côté ni à l’envers. |
|
Support de l’objet |
Bac |
|


Avantages de la solution
Les avantages de cette solution sont les suivants:
-
Utiliser l’algorithme de positionnement 3D développé de manière indépendante et employer la correspondance des arêtes pour localiser les objets cibles, ce qui améliore considérablement la précision du positionnement visuel.
-
Utiliser les derniers algorithmes d’imagerie caméra pour garantir une imagerie stable des pièces longues en tôle très réfléchissantes.
-
Avec une longue base, le nouveau modèle de caméra LSR XL-GL offre une répétabilité accrue de la valeur Z des points.
-
En explorant des cas typiques dans le logiciel avec l’aide de ce document, les ingénieurs débutants peuvent déployer rapidement une solution de vision.
Spécifications techniques
Le tableau suivant décrit les spécifications techniques de la solution.
| Précision de positionnement | Taux de réussite de la reconnaissance | Temps d’exécution du système de vision | Taux de vidage du bac | Durée de réglage |
|---|---|---|---|---|
±2 mm |
Supérieur à 99 % |
Inférieur à 5 s |
Supérieur à 99 % |
8 h × 2 (objet cible de type unique)
|
|
Le temps d’exécution du système de vision correspond à la durée allant de la capture de l’image à la sortie de la pose de l’objet cible. |
Difficultés du projet
Les difficultés de cette solution sont les suivantes:
-
Imagerie stable: On attend du système de vision qu’il génère des nuages de points de qualité malgré la forte réflectivité des objets cibles, ce qui constitue un défi majeur pour les algorithmes d’imagerie.
-
Précision de positionnement: Les objets cibles de ce type sont fins et étroits. Pour éviter de les endommager, il est nécessaire de garantir une grande précision dans le positionnement et la préhension.
-
Segmentation des objets: Les objets cibles sont disposés très près les uns des autres. En l’absence d’intervalles évidents entre les objets adjacents, il est difficile de les segmenter.