Informations de base
Cette section présente les informations de base sur la solution de petites pièces métalliques dans un bac profond, y compris son applicabilité, ses avantages, ses spécifications techniques, etc.
Applicabilité
Le tableau ci-dessous présente l’applicabilité de cette solution en termes de types d’objets, de matériaux des objets, de disposition, de conteneurs, etc.
| Faisable | Illustration | |
|---|---|---|
Type d’objet |
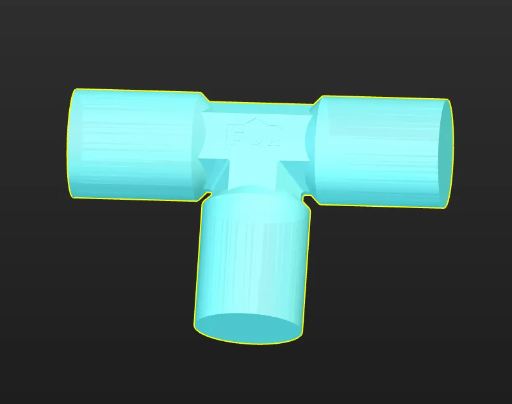
Petites pièces métalliques de différents types, telles que droites, coudées, en T (trois voies) et en croix (quatre voies) |
|
Matériau de l’objet |
Non réfléchissant ou légèrement réfléchissant |
|
Disposition |
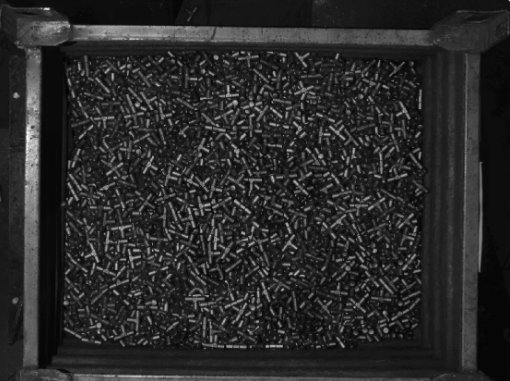
Disposition aléatoire |
|
Conteneur de l’objet |
Bac profond |
|


Avantages de la solution
Les avantages de cette solution sont les suivants :
-
Convient au prélèvement de petites pièces métalliques de divers types, en petites séries, et dans des environnements de production mixtes.
-
La planification intelligente de la séquence et de la méthode de prélèvement permet un prélèvement stable de petites pièces métalliques empilées aléatoirement.
-
La productivité globale peut être améliorée grâce au prélèvement robotisé guidé par vision 3D.
-
En explorant des cas typiques dans le logiciel avec l’aide de ce document, des ingénieurs débutants peuvent déployer rapidement une solution de vision.
Spécifications techniques
Le tableau suivant décrit les spécifications techniques de la solution.
| Précision de positionnement | Taux de réussite de la reconnaissance | Temps d’exécution du système de vision | Taux de vidage du bac | Durée de réglage |
|---|---|---|---|---|
±2 mm |
Supérieur à 99 % |
Inférieur à 3 s |
Supérieur à 97 % |
8 h × 2 (objet cible d’un seul type)
|
|
Le temps d’exécution du système de vision correspond à la durée allant de la capture de l’image à la sortie de la pose de l’objet cible. |
Difficultés du projet
Les difficultés de cette solution sont les suivantes :
-
Précision de positionnement : Les pièces métalliques sont petites et empilées de manière aléatoire dans un bac profond. Le système de vision doit générer des nuages de points de haute qualité et calculer les poses des petites pièces métalliques pour un positionnement haute précision.
-
Stratégie de prélèvement : Pour des petites pièces métalliques empilées aléatoirement et présentant des orientations différentes, en tenant compte de facteurs tels que la pose des pièces métalliques, les contraintes de trajectoire du robot et l’évitement des collisions, il convient de sélectionner les points de prise et la stratégie de prélèvement appropriés afin d’assurer le taux de vidage du bac.
-
Flexible et facile à utiliser : Convient au prélèvement d’objets cibles de différentes spécifications. La solution de vision doit être facile à déployer tout en répondant aux exigences des utilisateurs en matière d’efficacité, de maîtrise des coûts et d’autres facteurs.