Conception de la solution
Cette section présente la conception de la solution Petites pièces métalliques dans un bac profond, y compris le flux de travail du système de vision, la combinaison logicielle, la sélection du modèle de caméra et la sélection de la plaque de calibration.
Flux de travail du système de vision
Le flux de travail du système de vision est illustré dans la figure ci-dessous.

Cette solution doit être mise en œuvre en deux étapes :
-
Premièrement, reconnaître les petites pièces métalliques dans le bac profond, puis en prélever certaines et les déposer sur la station de repositionnement. Cela correspond au projet Petites pièces métalliques dans un bac profond dans Mech-Vision.
-
Deuxièmement, reconnaître les pièces métalliques sur la station de repositionnement, puis les prélever et les déposer sur la station de centrage. Cela correspond au projet Petites pièces métalliques sur la station de repositionnement dans Mech-Vision.
Après avoir configuré le projet de reconnaissance visuelle, vous pouvez exécuter le programme de prélèvement du robot modifié pour guider le robot à prélever de manière aléatoire et précise dans un bac profond rempli de petites pièces, automatisant ainsi l’approvisionnement en matériaux.
Combinaison logicielle
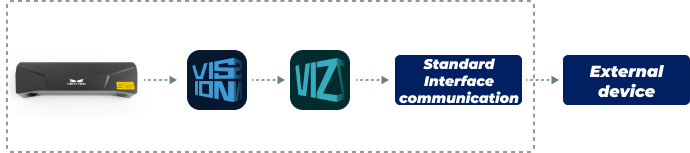
Cette solution utilise Mech-Vision pour reconnaître les poses des petites pièces métalliques dans le bac profond et Mech-Viz pour planifier la trajectoire de prélèvement.
Comme montré ci-dessous, Mech-Viz planifie une trajectoire de prélèvement robotisée sur la base de la pose et la renvoie à un dispositif externe (tel qu’un robot, un PLC, etc.) via l’Interface standard.
Sélectionner la caméra et déterminer la hauteur de montage
Pour le chargement de petites pièces métalliques dans le bac profond, Mech-Eye PRO S-GL Caméra 3D industrielle (ci-après PRO S-GL) et Mech-Eye PRO M-GL Caméra 3D industrielle (ci-après PRO M-GL) sont recommandées, en fonction du champ de vision de la caméra, de la précision et de la distance de travail. Les caméras offrent une grande précision, une vitesse élevée et une excellente résistance à la lumière ambiante. Pour des spécifications techniques détaillées de ces deux caméras, veuillez consulter Spécifications techniques de la série PRO. Si vous devez utiliser une caméra d’autres modèles, veuillez utiliser le sélecteur de caméra 3D pour sélectionner le modèle approprié.
Après avoir déterminé le modèle de caméra, veuillez utiliser le Sélecteur de caméra 3D pour déterminer la hauteur de montage de la caméra. Suivez les étapes ci-dessous :
-
Déterminez les dimensions des objets sur la couche supérieure ainsi que la hauteur maximale possible, puis renseignez Longueur, Largeur et Hauteur dans le panneau Dimensions de l’objet.
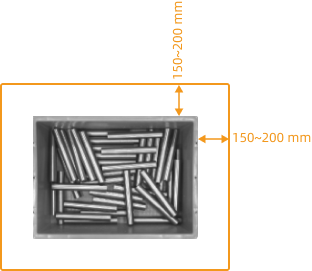
Pour prendre en compte des écarts dans la position des objets entrants, une marge de 150–200 mm doit être laissée de chaque côté de la couche supérieure, comme illustré ci-dessous. Autrement dit, les valeurs de longueur et de hauteur doivent être égales aux dimensions de la couche supérieure des objets plus la marge réservée montrée sur la figure ci-dessous.
-
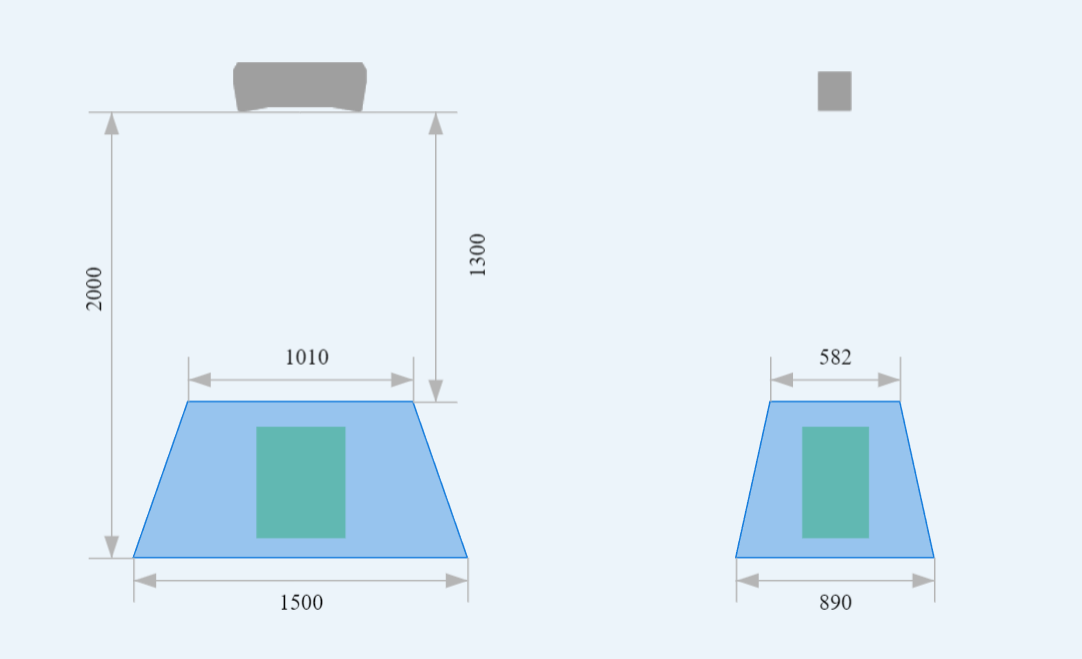
Activez l’interrupteur à droite de Distance de la caméra à l’objet et continuez à ajuster la valeur du paramètre jusqu’à ce que le carré à droite représentant l’objet soit au centre du champ de vision de la caméra et soit entièrement couvert, c’est-à-dire que le carré devienne vert.
-
Hauteur de montage = Distance de la caméra à l’objet + hauteur de l’objet
Afin d’assurer une bonne qualité des données, la distance entre la caméra et la couche supérieure de l’objet doit se situer dans la distance de travail recommandée, sous réserve que les exigences du champ de vision (FOV) et de l’espace de travail du robot soient respectées.
Sélectionner la plaque de calibration
-
PRO S-GL
-
Quand la distance de travail est de 500–800 mm, le modèle de plaque de calibration recommandé est CGB-020.
-
Quand la distance de travail est de 800–1000 mm, le modèle de plaque de calibration recommandé est CGB-035.
-
-
PRO M-GL
-
Quand la distance de travail est de 1000–1500 mm, le modèle de plaque de calibration recommandé est CGB-035.
-
Quand la distance de travail est de 1500–2000 mm, le modèle de plaque de calibration recommandé est CGB-050.
-
Sélectionner le modèle d’IPC
L’IPC recommandé est Mech-Mind IPC STD, qui convient aux scénarios de dépalettisation et de chargement courants.
Sélectionner le modèle de robot
Pour prélever de petites pièces métalliques, il convient de sélectionner un robot six axes haute précision en fonction de la plage de prélèvement et des exigences de précision. Le robot FANUC_M_10ID_12 est utilisé comme exemple dans cette solution.
Pour les robots d’autres marques, veuillez consulter Sélection du modèle de robot.
Conception de l’agencement du poste de travail
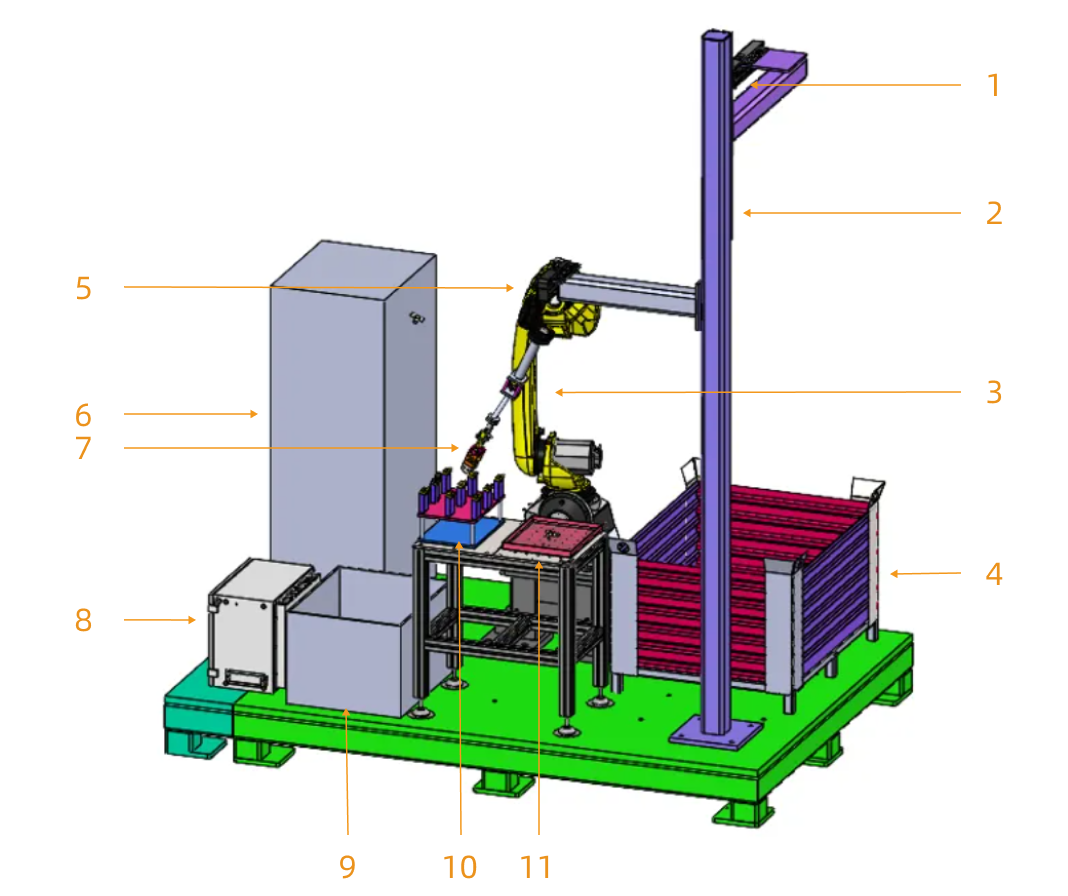
L’agencement du poste de travail sur site est illustré dans la figure ci-dessous. La PRO M-GLcamera est montée à 2 mètres directement au-dessus du bac. Après la capture de l’image, la caméra peut acquérir les nuages de points du bac et de tous les objets cibles qu’il contient. La PRO S-GLcamera est montée à 1 mètre directement au-dessus de la station de repositionnement. Après la capture de l’image, la caméra peut acquérir les nuages de points de tous les objets cibles sur la station de repositionnement. Les éléments de la figure sont : 1-PRO M-GL camera; 2-cadre de montage de la caméra; 3-robot; 4-bac d’alimentation; 5-PRO S-GL camera; 6-armoire électrique; 7-outil du robot; 8-commande du robot; 9-bac temporaire; 10-station de centrage; 11-station de repositionnement.
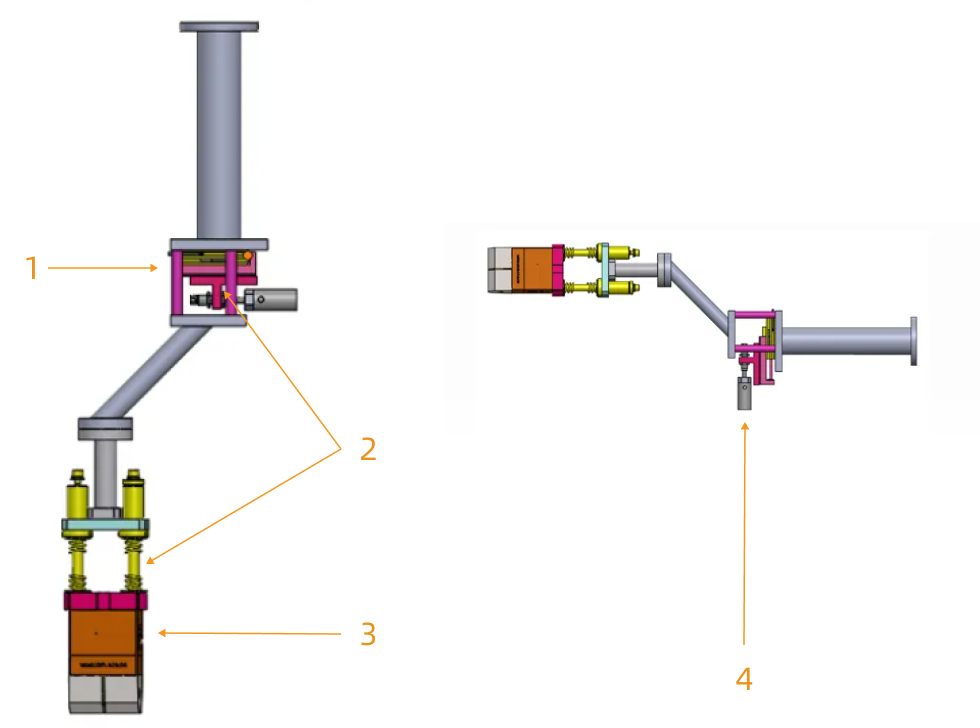
Conception de l’outil du robot
Le préhenseur utilisé dans cette solution est illustré dans la figure ci-dessous. Les éléments de la figure sont : 1-vérin pneumatique; 2-amortisseur; 3-aimant permanent à commande pneumatique; 4-électroaimant. L’aimant permanent à commande pneumatique est utilisé pour prélever de petites pièces métalliques dans le bac, et la configuration du préhenseur est montrée à gauche. L’électroaimant est utilisé pour prélever de petites pièces métalliques sur la station de repositionnement, et la configuration du préhenseur est montrée à droite.