FAQ sur le déploiement de la solution
Cette section présente les problèmes courants, leurs causes possibles et les solutions pour la solution Disques hautement réfléchissants.
Problème 1 : échec de la planification de trajectoire
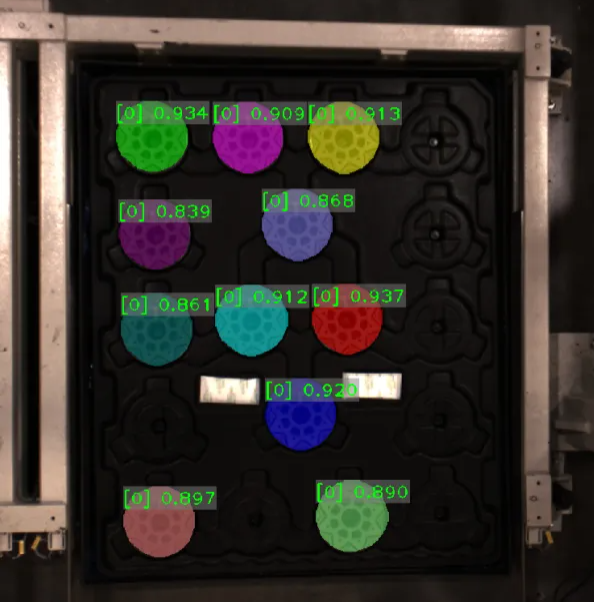
Problème 2 : mauvaise qualité du nuage de points de l’objet
Symptôme
Le nuage de points de l’objet cible est de mauvaise qualité et ne répond pas aux exigences, ce qui affecte la préhension ultérieure.
Causes possibles
-
Les paramètres d’exposition de la caméra n’ont pas été correctement définis.
-
La lumière ambiante sur site était trop forte, affectant la qualité du nuage de points de l’objet cible.
Solutions
-
Ajustez les paramètres d’exposition de la caméra dans Mech-Eye Viewer, et définissez le Mode de codage de franges sur Réfléchissant pour obtenir un nuage de points complet de l’objet cible. Pour des descriptions détaillées des paramètres de la caméra, veuillez consulter LSR L-GL Référence des paramètres de la caméra.
-
Ajustez la lumière ambiante sur site ou utilisez un dispositif d’ombrage.
Problème 3 : déviation du résultat de reconnaissance de l’objet
Symptôme
Le résultat de reconnaissance de l’objet cible présentait une déviation et ne répondait pas aux exigences.
Causes possibles
-
Le modèle d’appariement était inapproprié.
-
Les paramètres d’appariement n’ont pas été correctement définis.
-
La reconnaissance n’était pas assistée par l’apprentissage profond.
Solutions
-
Si le nuage de points de l’objet cible fluctue fortement, définissez le mode d’appariement fin dans la catégorie mode d’appariement sur appariement de surface.
-
Définissez le Mode de performance dans les catégories Paramètres d’appariement grossier et Paramètres d’appariement fin sur Haute précision. Puis, définissez la Capacité de correction de déviation dans la catégorie Paramètres d’appariement fin sur Faible. Dans la catégorie Ajuster ou filtrer les poses issues de l’appariement grossier, définissez Sélectionner la stratégie sur Ajuster l’orientation de l’axe X, et définissez Orientation de l’axe X sur 0°. Cela garantit que les orientations de l’axe X des poses appariées des objets cibles s’alignent autant que possible sur les orientations de l’axe X des points du centre de l’objet, améliorant ainsi la précision de la préhension.
-
Utilisez une reconnaissance assistée par l’apprentissage profond pour supprimer les interférences des plateaux et autres nuages de points de la scène, améliorant ainsi les performances de reconnaissance.
Problème 4 : dommages à l’objet
Causes possibles
-
Les objets cibles ont été accidentellement endommagés par pincement et frottement contre les alvéoles du plateau de pièces durant la préhension.
-
Les objets cibles n’étaient pas au centre des alvéoles du plateau de pièces, mais proches d’un côté. Par conséquent, même une très petite déviation lors de la préhension (p. ex. 0,5 mm) peut provoquer un pincement ou un frottement entre les objets cibles et les alvéoles du plateau de pièces, endommageant ainsi les objets cibles.
Solutions
Localisez d’abord les poses centrales des alvéoles du plateau et des objets cibles respectivement. Ensuite, utilisez les valeurs X et Y des poses centrales des alvéoles du plateau pour remplacer celles des poses centrales des objets cibles. Cela garantit que les objets cibles sont poussés vers le centre des alvéoles lorsque la pince se ferme pendant la préhension, empêchant le frottement entre les objets cibles et les alvéoles et évitant ainsi d’endommager l’objet cible.