FAQ sur le déploiement de la solution
Cette section présente les problèmes courants, les causes possibles et les solutions pour la solution Petites pièces métalliques dans un bac profond.
Problème 1 : Temps de planification de trajectoire long
Symptôme
La planification de trajectoire avec Mech-Viz prend beaucoup de temps, ce qui entraîne un long temps d’attente du robot.
Causes possibles
-
La séquence de poses délivrée par Mech-Vision est inadéquate, ce qui augmente le nombre d’échecs de planification de trajectoire dans Mech-Viz.
-
Il y a un problème dans la configuration des paramètres du projet Mech-Viz.
-
De multiples tentatives inutiles basées sur la symétrie de rotation ont été effectuées lors de l’utilisation de Mech-Viz pour la planification de trajectoire.
Solution
-
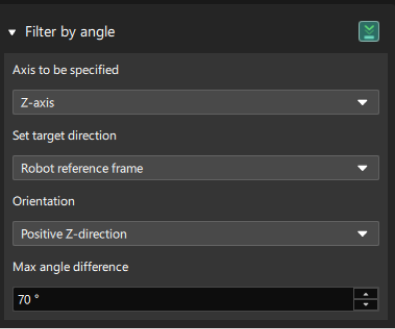
Utilisez l’outil d’ajustement de pose pour filtrer les poses, par exemple en utilisant la méthode Filtrer par angle pour éliminer les poses ayant des angles de prise inappropriés.
-
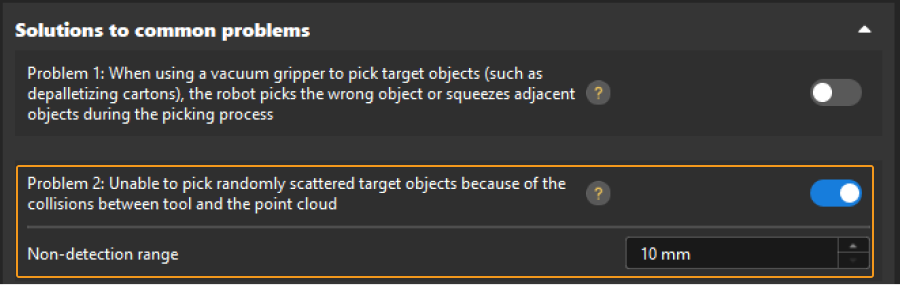
Désactivez les fonctionnalités longues et inutiles dans Mech-Viz, par exemple en coupant l’interrupteur à côté deProblème 1 sous Solutions aux problèmes courants dans le panneau fonctionnel Collisions, c’est-à-dire ne pas retirer le nuage de points de l’objet cible.

-
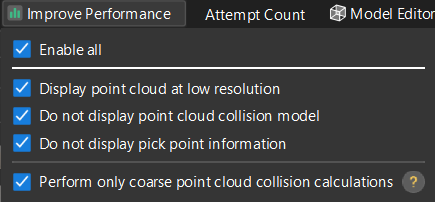
Assurez-vous que toutes les options sous Améliorer les performances dans la barre d’outils de Mech-Viz sont sélectionnées.
-
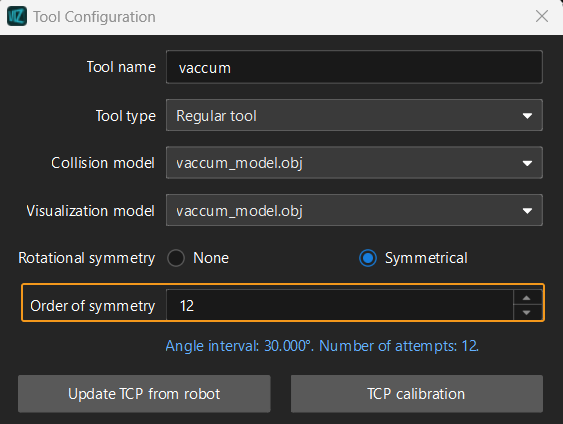
Lors de la configuration des outils d’effecteur final, définissez la valeur Ordre de symétrie en fonction de la situation réelle, afin de réduire les tentatives de prise inutiles.
Problème 2 : Échec de la planification de trajectoire
Causes possibles
-
Les poses de l’objet cible produites par Mech-Vision sont hors de l’espace de travail du robot.
-
Les réglages des points de passage dans Mech-Viz sont inadéquats, entraînant des collisions entre le robot et les objets de la scène.
-
Lors de la prise de l’objet cible avec un outil, l’outil entre en collision avec le nuage de points représentant la surface de l’objet cible et le volume de collision dépasse le Seuil de détection de collision.
Solution
-
Vérifiez si les poses de l’objet cible produites par Mech-Vision sont correctes.
-
Ajoutez des points de passage intermédiaires appropriés dans Mech-Viz selon la situation réelle.
-
Examinez si les collisions sont autorisées lorsque l’outil saisit l’objet cible.
-
Si les collisions sont autorisées, activez l’interrupteur à droite de Problème 2 sous Solutions aux problèmes courants dans le panneau fonctionnel Collisions et définissez la Plage de non-détection. Une fois cette option activée, les collisions de nuage de points dans la zone adjacente au point de prise ne seront pas détectées.
-
Si les collisions ne sont pas autorisées, vérifiez si le Seuil de détection de collision est trop faible. Si la valeur de ce paramètre est appropriée mais que l’objet cible entre quand même en collision avec l’outil, d’autres stratégies de prise peuvent être envisagées.
-
Problème 3 : Échec d’appariement du modèle de nuage de points ou non-détection de l’objet cible
Symptôme
Lors de l’appariement du modèle de nuage de points, il arrive que l’appariement échoue ou que des objets cibles soient manqués.
Causes possibles
-
Le nombre maximal de poses obtenues par l’appariement a été atteint.
-
Le score de la pose appariée est inférieur au Seuil de confiance.
-
Certains objets cibles sont chevauchés par d’autres et le Seuil du taux de chevauchement est dépassé, ce qui conduit à une non-détection.
-
Des points manquants dans le nuage de points de l’objet cible entraînent des non-détections.
Solution
-
Augmentez la valeur du paramètre Sorties max.
-
Ajustez la valeur du paramètre Seuil de confiance selon la situation réelle pour éliminer les poses à faible score.
-
En application réelle, on peut utiliser un Seuil du taux de coïncidence et un Seuil du taux de chevauchement plus élevés si la prise d’objets cibles chevauchés et coïncidants est autorisée.
-
Ajustez les paramètres d’exposition de la caméra dans Mech-Eye Viewer, et définissez le Mode de codage par franges sur Réfléchissant pour obtenir un nuage de points complet de l’objet cible. Pour des descriptions détaillées des paramètres de la caméra, veuillez consulter Référence des paramètres de la caméra.