Sélection du robot
Cette section décrit comment sélectionner un modèle de robot.
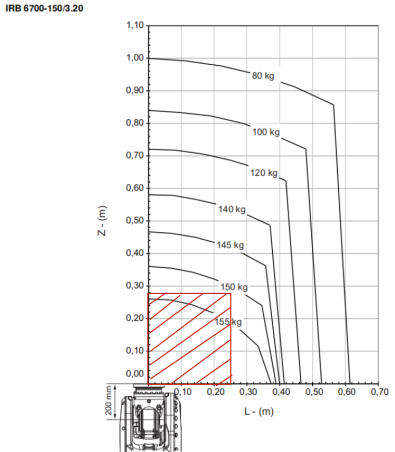
Vérifier la charge utile du robot
Lors de la vérification de la charge utile du robot, les poids de l’outil terminal, de l’objet cible et de la tuyauterie doivent être considérés de manière globale, et la corrélation entre le centre de gravité et le couple au niveau de la bride J6 du robot doit être conforme au diagramme de charge utile.
Plage accessible du robot dans la zone de travail
Il existe de nombreuses façons de vérifier la plage accessible du robot, telles que : Mech-Viz, CAD, robcad et RobotStudio.
Comme illustré dans l’image suivante, vous pouvez utiliser Mech-Viz pour visualiser la plage accessible.
Sélection du mode de communication
Le modèle de robot choisi doit pouvoir communiquer correctement avec le système de vision.
-
Si vous utilisez la communication Standard Interface, vous devez confirmer que la marque et le modèle de robot sélectionnés prennent en charge la communication Standard Interface avec le système de vision, et que le contrôleur du robot répond aux exigences logicielles et matérielles. Pour plus d’informations, voir Communication via Interface Standard .
-
Si vous utilisez la communication Master-Control, vous devez confirmer que la marque et le modèle de robot sélectionnés prennent en charge la communication Master-Control avec le système de vision, et que le contrôleur du robot répond aux exigences logicielles et matérielles. Pour plus d’informations, voir Communication maître .
Vérification des degrés de liberté du robot
Lors de la sélection du modèle, les degrés de liberté du robot doivent être précisés afin de garantir que le robot peut répondre aux exigences de mouvement pour la tâche de picking.
La plupart des robots industriels ont de 4 à 7 degrés de liberté, 6 étant le plus courant. Un nombre plus élevé de degrés de liberté améliore l’accessibilité et la flexibilité du robot dans des environnements complexes.
Lors du choix des degrés de liberté du robot, les facteurs suivants doivent être pris en compte :
-
Complexité de la tâche : savoir si la tâche nécessite un ajustement simultané de la position et de l’orientation.
-
Contraintes de l’espace de travail : déterminer si l’espace est confiné, ce qui peut nécessiter un nombre plus élevé de degrés de liberté pour un mouvement flexible.
-
Exigences de pose pour la prise : déterminer si une pose spécifique de l’outil doit être maintenue pendant la prise.
-
Méthode de montage : savoir si le robot sera monté au sol, au plafond ou au mur, car cela influence les degrés de liberté requis.
Il est recommandé d’évaluer de manière exhaustive les degrés de liberté nécessaires sur la base de ces facteurs afin de garantir que le robot puisse effectuer la prise avec succès.