Custom Reference Frame
This tool is used to define a custom reference frame for display. The depth map and point cloud can be displayed in the custom reference frame.
|
The custom reference frame only affects the display in Mech-Eye Viewer and does not affect the actual data in the depth map and point cloud. |
Suitable Scenarios
A custom reference frame is suited for scenarios where the camera is not mounted directly above the target object, as shown below.
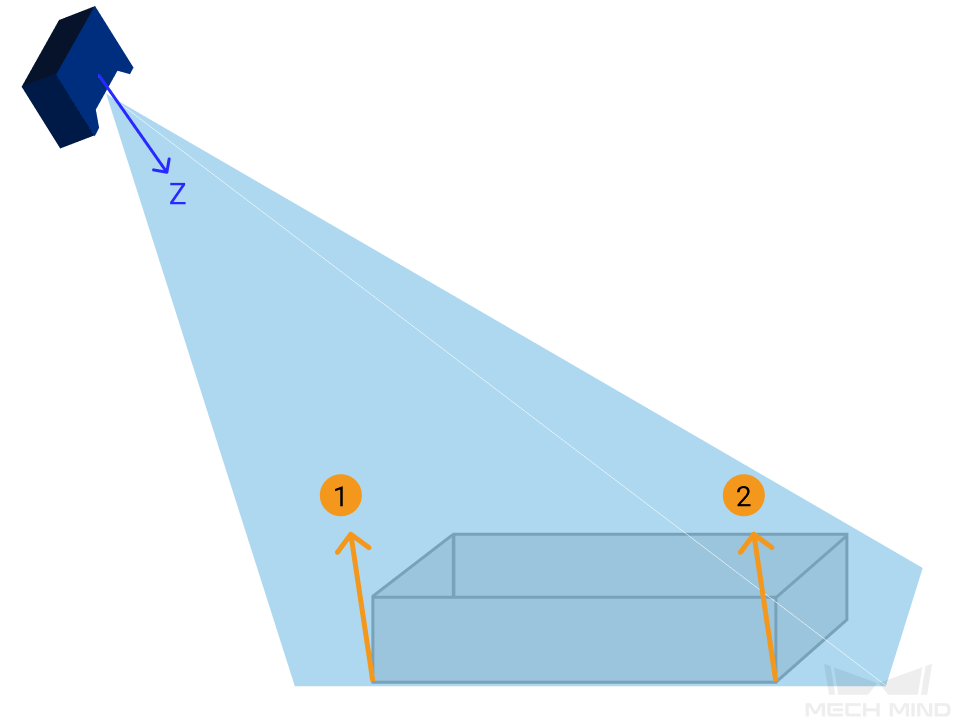
In the above figure, Points ① and ② are at the same height in the eye of an observer. However, since the Z-axis of the camera reference frame is not perpendicular to the plane where the target object is located, the depth values of the two points differ in the obtained depth map and point cloud.

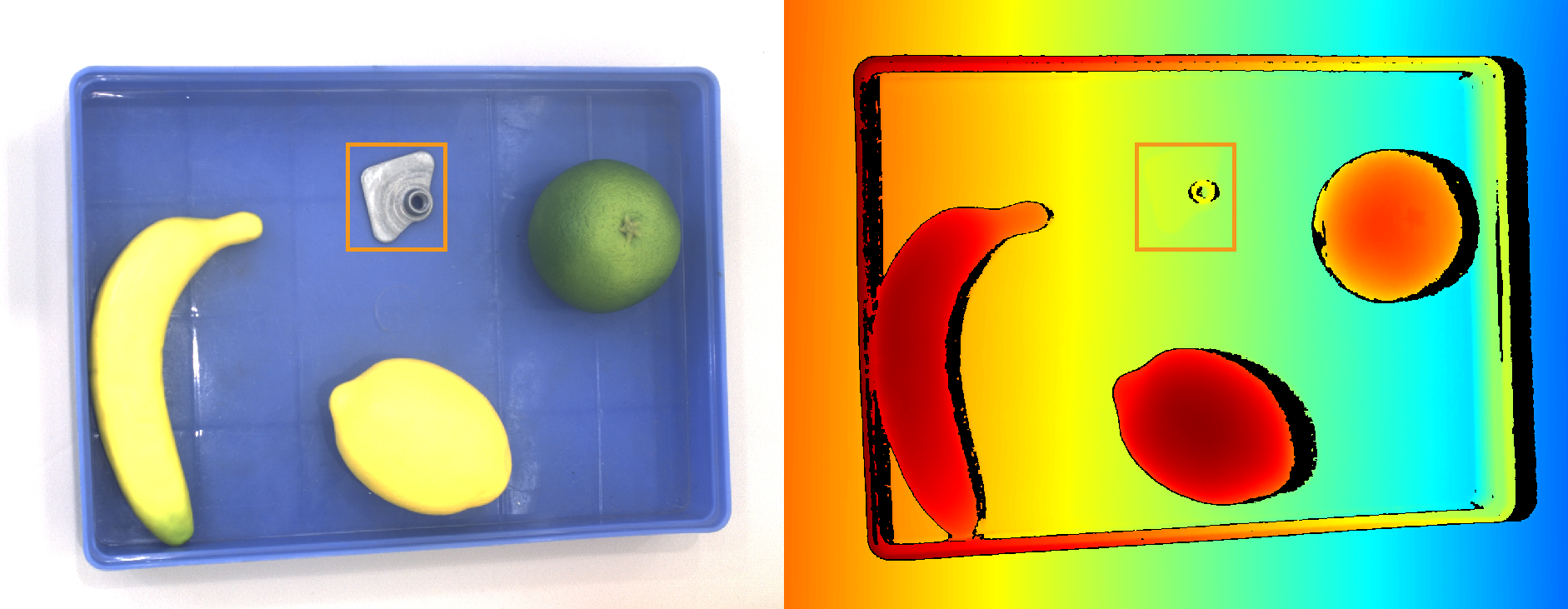
In addition, in the camera reference frame, the thickness of a flat, thin object is “subsumed” by the depth change of the surface where the object is located, making it difficult to observe the object itself.
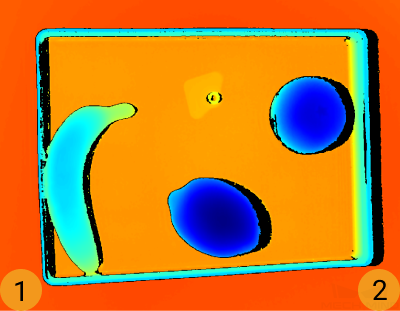
By defining a custom reference frame, you can adjust the display of the depth map and point cloud, making the depth values of points ① and ② the same and the thin target object easily observable, as shown below.
Instructions
Follow these steps to define a custom reference frame:
-
Adjust the position of the point cloud and find the surface to be used as the XY-plane of the custom reference frame.
-
Hold the Shift key and click on the point cloud to select 3 points. The 3 points serve the following functions:
-
The first point is the origin of the reference frame.
-
The second point determines the positive direction of the X-axis.
-
The third point determines the positive direction of the Y-axis.
-
-
After the 3 points are selected, the reference frame is generated according to the right-hand rule. Rotate and zoom the point cloud to check if the reference frame meets your needs:
-
Check if the three points are located on the same surface.
-
Check if the orientation of the Z-axis is correct.
If not, Click Reset in the lower right, and then repeat step 2.
-
-
Click OK to save the custom reference frame.
Use the Custom Reference Frame
To display the depth map and point cloud in the custom reference frame, follow these steps:
-
In the data display area, switch to Depth Map or Point Cloud.
-
At the top of the left panel, click the Reference Frame drop-down menu and select Custom. The depth map and point cloud will be displayed in the custom reference frame.
| The reference frame setting is simultaneously applied to both depth map and point cloud. |