Point Cloud Loss
Point cloud loss refers to the occasional phenomenon that the acquired point cloud has some missing parts. This chapter introduces the possible causes of and corresponding solutions to point cloud loss.
Possible Causes
-
Intense ambient light disrupts the structured light projected onto the surface of the target object, leading to inaccuracy in the calculated depth data.
-
Specular reflection occurs on the surface of the target object.
-
The complex shape of the target object leads to interreflection, or interreflection occurs between the target object and the bin wall.
Solutions
Please follow these steps to troubleshoot the issue:
-
Clean the camera lens. Then acquire data again and check the point cloud quality.
-
If point cloud loss is resolved, the troubleshooting is completed.
-
If the point cloud is still incomplete, go to the next step.
-
-
Figure out the possible cause(s) of point cloud loss according to the working conditions, and check the solutions in the corresponding section(s) following the table below.
Point cloud loss can be the common result of several causes.
Working conditions Possible causes The workstation is near to a window or the light of the workplace is intense.
The target object has smooth, glossy surfaces.
The target object has complex shapes and smooth, glossy surfaces, or the bin is smooth, glossy.
Point Cloud Loss Caused by Intense Ambient Light
| 2D image | Point Cloud |
|---|---|
|
|

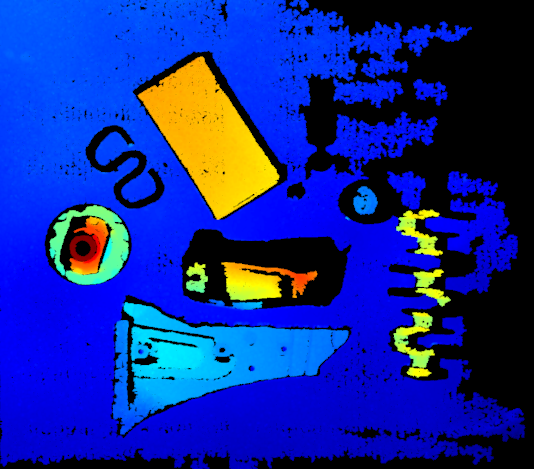
When point cloud loss is caused by intense ambient light, try the solutions below:
-
Cover the light source with light shields.
-
Decrease the values of Exposure Time and Gain in the 3D Parameters group.
-
Adjust the brightness or projection range of the structured light: Switch to the Guru level, and adjust parameter settings in the 3D Parameters category according to the camera model following the table below.
Model Parameter Settings NANO, NANO ULTRA, PRO S, PRO M, PRO XS, and UHP-140
-
Increase the value of Light Brightness in the Projector subcategory.
DEEP, LSR S, LSR L, Laser L and Laser L Enhanced
-
Increase the value of Laser Power in the Laser subcategory.
-
Decrease the value of Laser Frame Amplitude in the subcategory Laser Projection Frame Control.
After decreasing this parameter value, the projection area of the structured light will narrow. The camera cannot capture data outside the projection area.
-
Increase the value of Laser Frame Partition Count in the subcategory Laser Projection Frame Control.
-
This parameter is unavailable when Fringe Coding Mode in the 3D Parameters category is set to Reflective.
-
A larger value of this parameter will result in slower acquisition.
-
-
-
Reduce the working distance by moving the camera or the target object.
-
Avoid the intense ambient light by adjusting the position or angle of the camera.
Adjust parameter settings again after moving the camera or target object.
Point Cloud Loss Caused by Specular Reflection
| Object | Point Cloud |
|---|---|
|
|

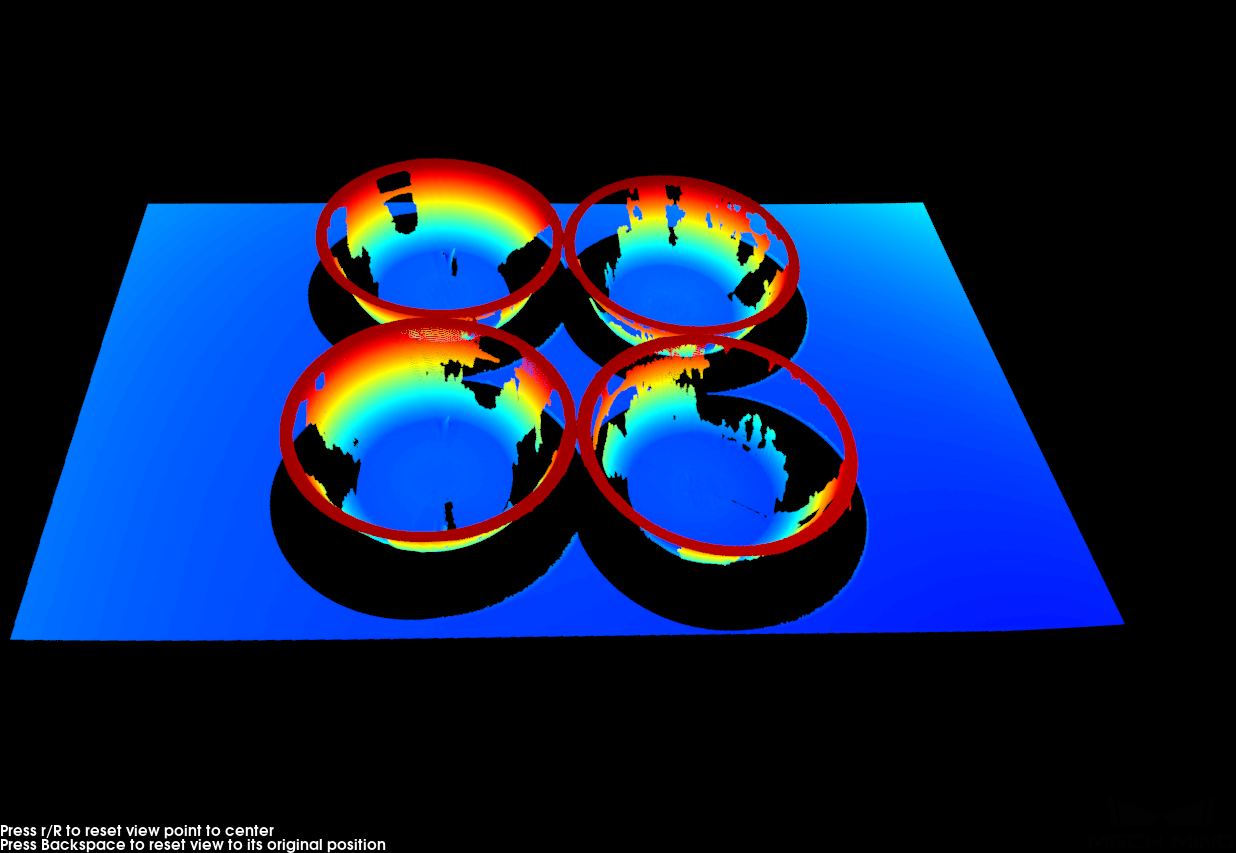
Specular reflection can result in underexposed or overexposed areas on the surface of the target object, thus leading to point cloud loss in these areas.
-
When point cloud loss is caused by specular reflection, try the solutions below:
-
If DEEP, LSR S, LSR L, NANO ULTRA, PRO S, or PRO M is in use, set the value of Fringe Coding Mode to Reflective.
-
When Fringe Coding Mode is not set to Reflective, set multiple exposures in the 3D Parameters category and adjust each exposure time.
-
-
If specular reflection only results in overexposed areas on the surface of the target object, try the solutions below:
-
Lower the brightness of the structured light: Switch to the Guru level, and adjust parameter settings in the 3D Parameters category according to the camera model following the table below.
Model Parameter Settings NANO, NANO ULTRA, PRO S, PRO M, PRO XS, and UHP-140
Decrease the value of Light Brightness in the Projector subcategory.
DEEP, LSR S, LSR L, Laser L and Laser L Enhanced
Decrease the value of Laser Power in the Laser subcategory.
-
Reduce the amount of light reflected onto the sensor by adjusting the position or angle of the camera or the target object.
-
-
If specular reflection only results in underexposed areas on the surface of the target object, try the solutions below:
-
Increase the amount of light reflected onto the sensor by adjusting the position or angle of the camera or the target object.
Adjust parameter settings again after moving the camera or target object.
-
Point Cloud Loss Caused by Interreflection
| Object | Point Cloud |
|---|---|
|
|
|
|

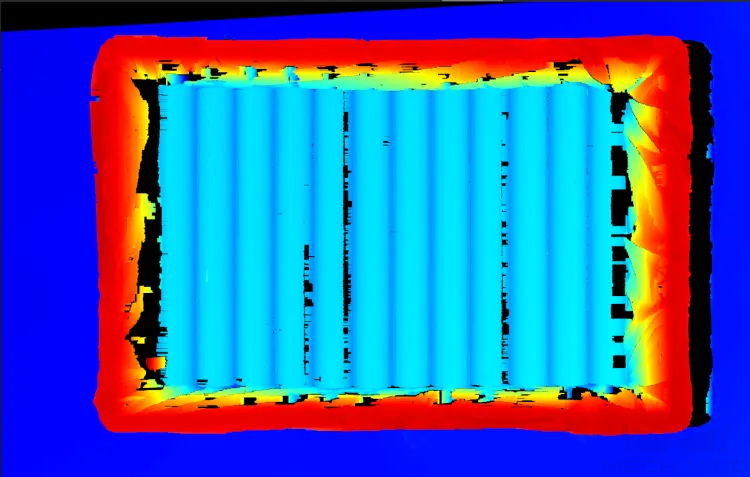

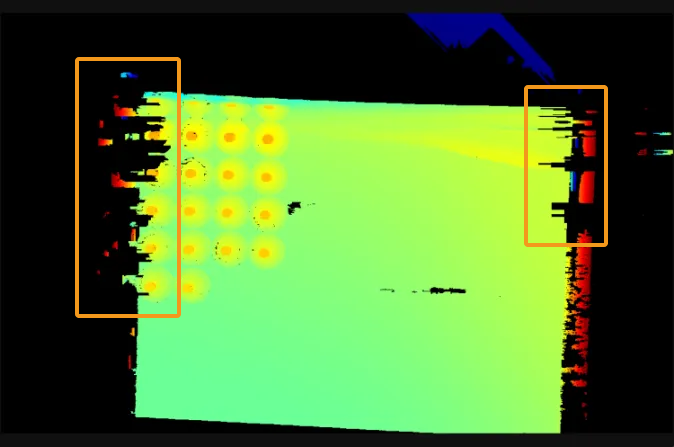
When interreflection from the bin wall or the surface of the target object leads to point cloud loss, try the solutions below:
-
If DEEP, LSR S, LSR L, NANO ULTRA, PRO S, or PRO M is in use, set the value of Fringe Coding Mode to Reflective.
-
When Fringe Coding Mode is not set to Reflective, set multiple exposures in the 3D Parameters category and adjust each exposure time.
If interreflection from the bin wall leads to point cloud loss, try the solutions below:
-
Switch to the Guru level, and decrease the value of Laser Frame Amplitude in the subcategory Laser Projection Frame Control of the 3D Parameters category.
-
Cover the bin wall with a black cloth.
-
Change to a less reflective bin.
-
Move the bin horizontally to a position directly below the camera.
This solution can prevent interreflection between the target object and up to two adjacent walls of the bin.
-
Lift the camera so that the bin fills the whole FOV.
Adjust parameter settings again after moving the camera or target object.