Cascaded Modules Commonly Used for 3D Robot Guidance
This topic introduces common cascaded modules in 3D robot guidance and provides example projects for practice.
-
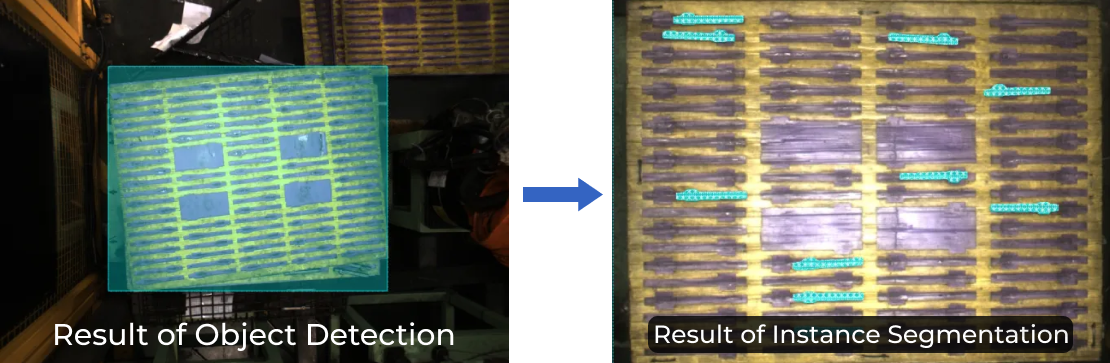
Object Detection–Instance Segmentation (Click to download the example project)
-
Feature: Detect the target area and then locate the objects to be picked within the area.
-
Applicable scenarios: Pallet, bin, and stacking scenarios where the incoming material height varies greatly and the position of the incoming material is random, making a fixed ROI unable to cover all positions.
-
-
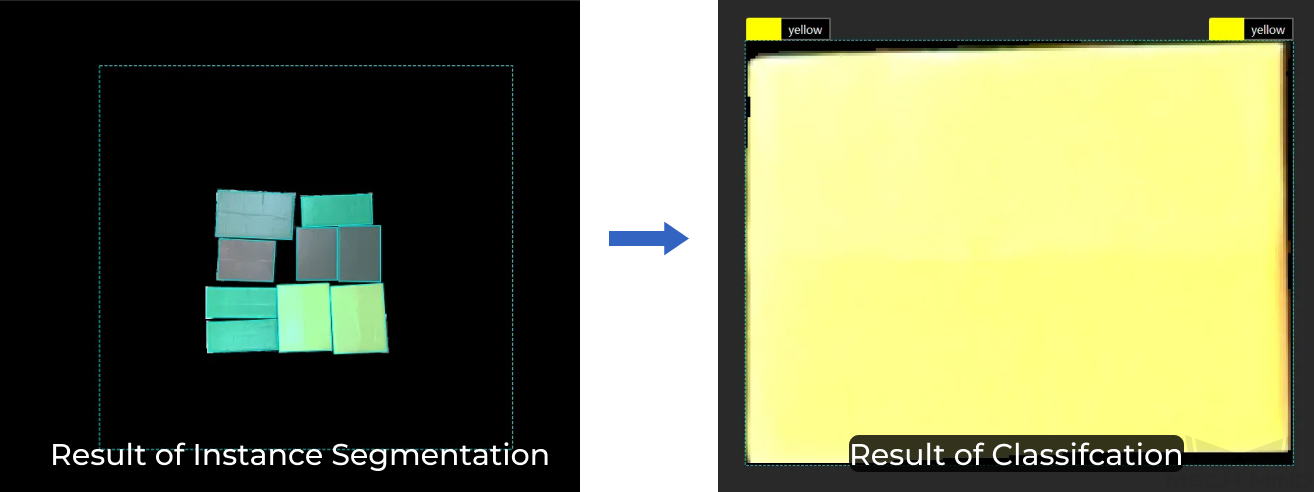
Instance Segmentation–Classification (Click to download the example project)
-
Feature: Segment the individual objects in the image, then classify and label each object.
-
Applicable scenarios: Use the super models to recognize cartons and sacks, and differentiate between object classes based on surface color, patterns, and other features.
-