Mech-Eye SDK 2.3.3 更新説明
Mech-Eye Viewer
新しい型番 NANO ULTRA に対応可能
Mech-Eye SDK 2.3.3 は新しいカメラ型番 NANO ULTRA を接続し、それを制御してパラメータを調整してデータを収集することができます。また、NANO ULTRA には反射部品溶接組み込みパラメータグループがあり、反射部品の溶接や一定角度で 2つの部品の溶接に適用できます。
|
|
|
|
|
|


NANO ULTRA の技術仕様は、NANO ULTRAをお読みください。
| Mech-Vision を NANO ULTRA に接続するには、1.8.2 以上のバージョンを使用してください。 |
PRO S と PRO M:コーディングモードで反射する対象物の画像を取得する速度・効果の改善
PRO S と PRO M シリーズのファームウェアを 2.3.3 バージョンにアップグレートすると、コーディングモードの反射を使用する時、以下のような改善が可能です。
-
2.3.2 バージョンより収集時間が短いです。
-
ROI を設定しないと、深度データの収集時間は約 20% 短縮されます。
-
ROI を設定するとさらに短縮できます。
ROI を元画像の半分に設定すると、深度データの収集時間は約 32% 短縮できます。元画像の四分の一に設定すると約 40% 短縮できます。
-
-
以下の深度データ品質の改善が可能です。
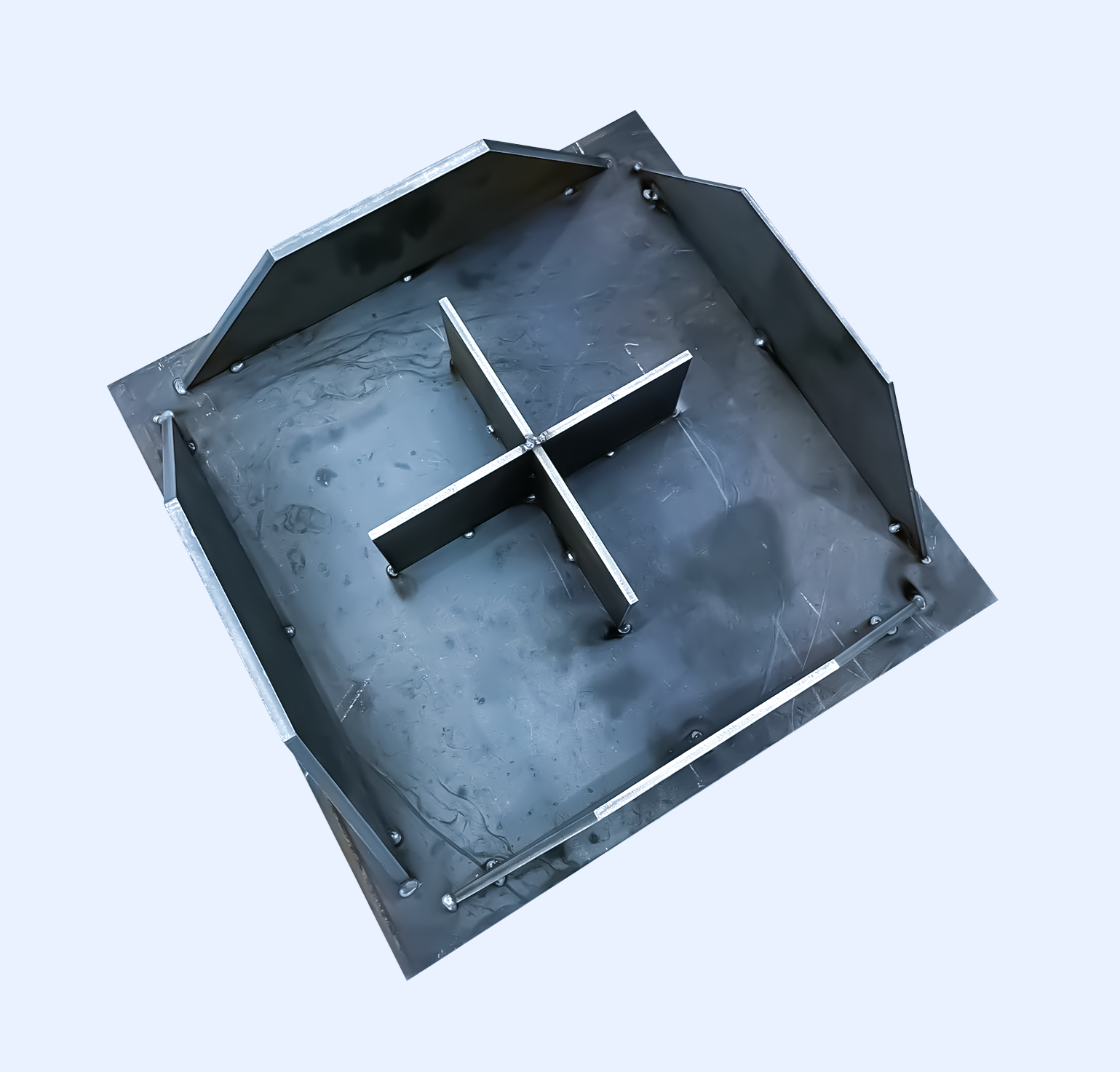
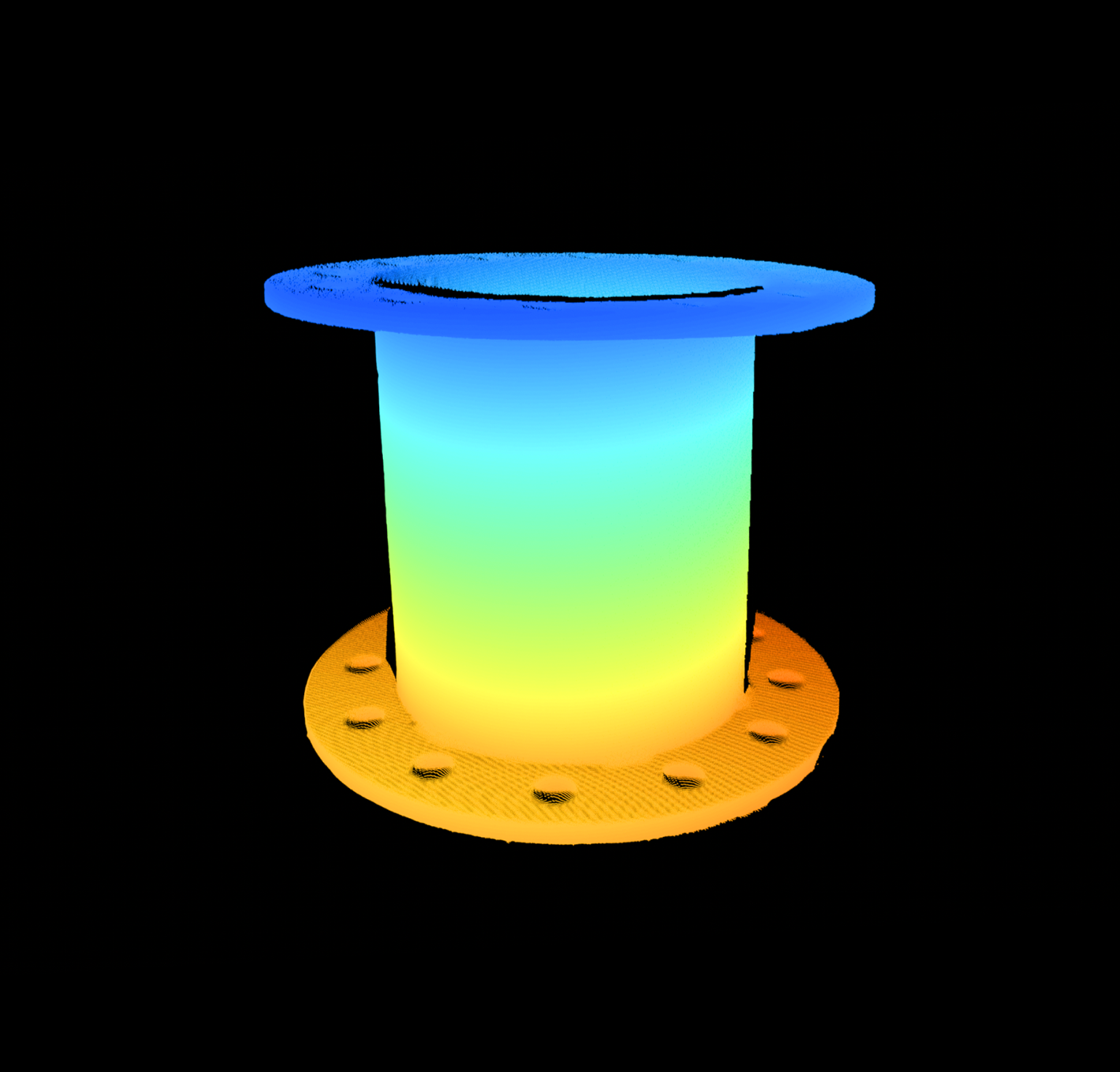
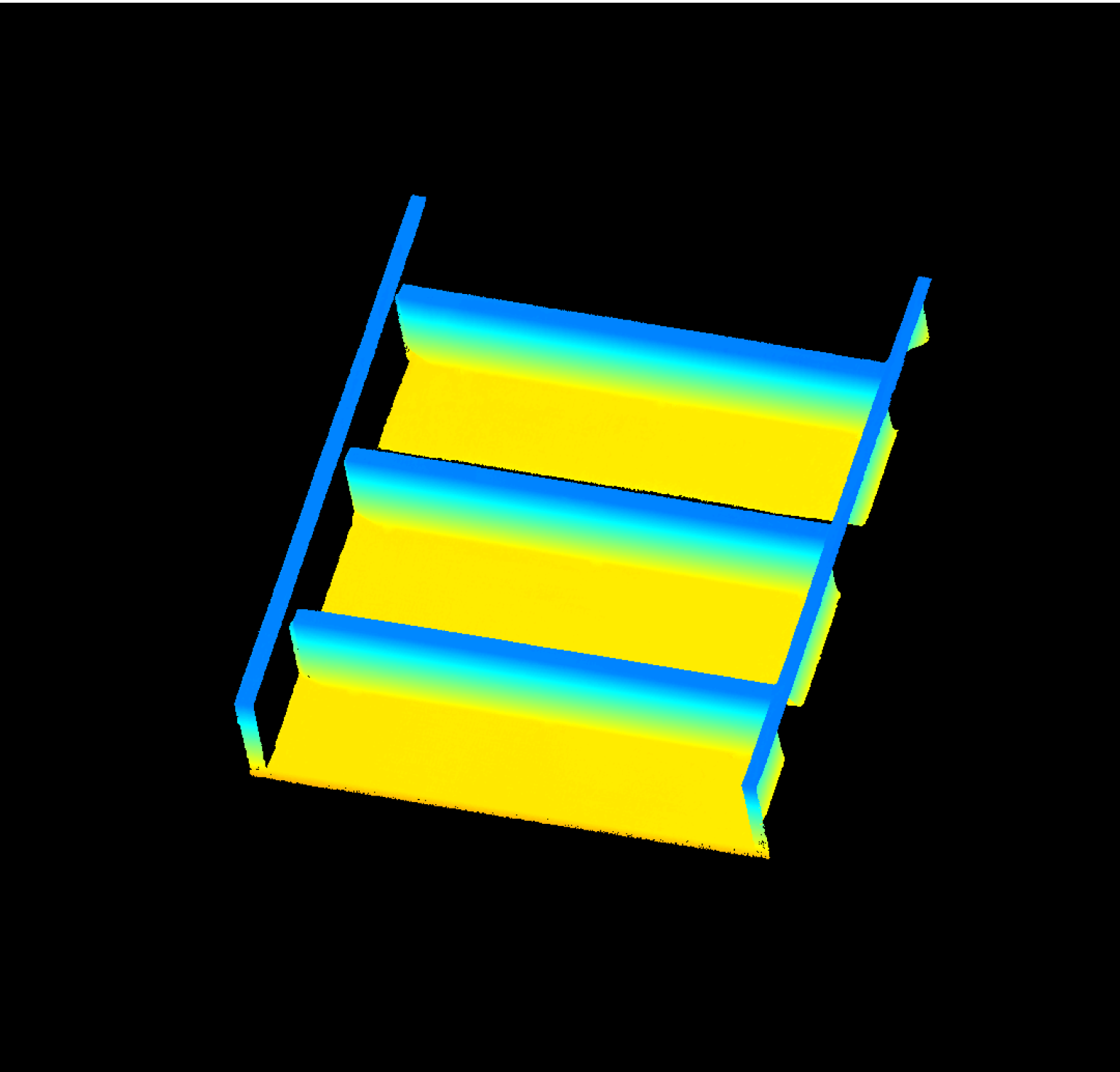
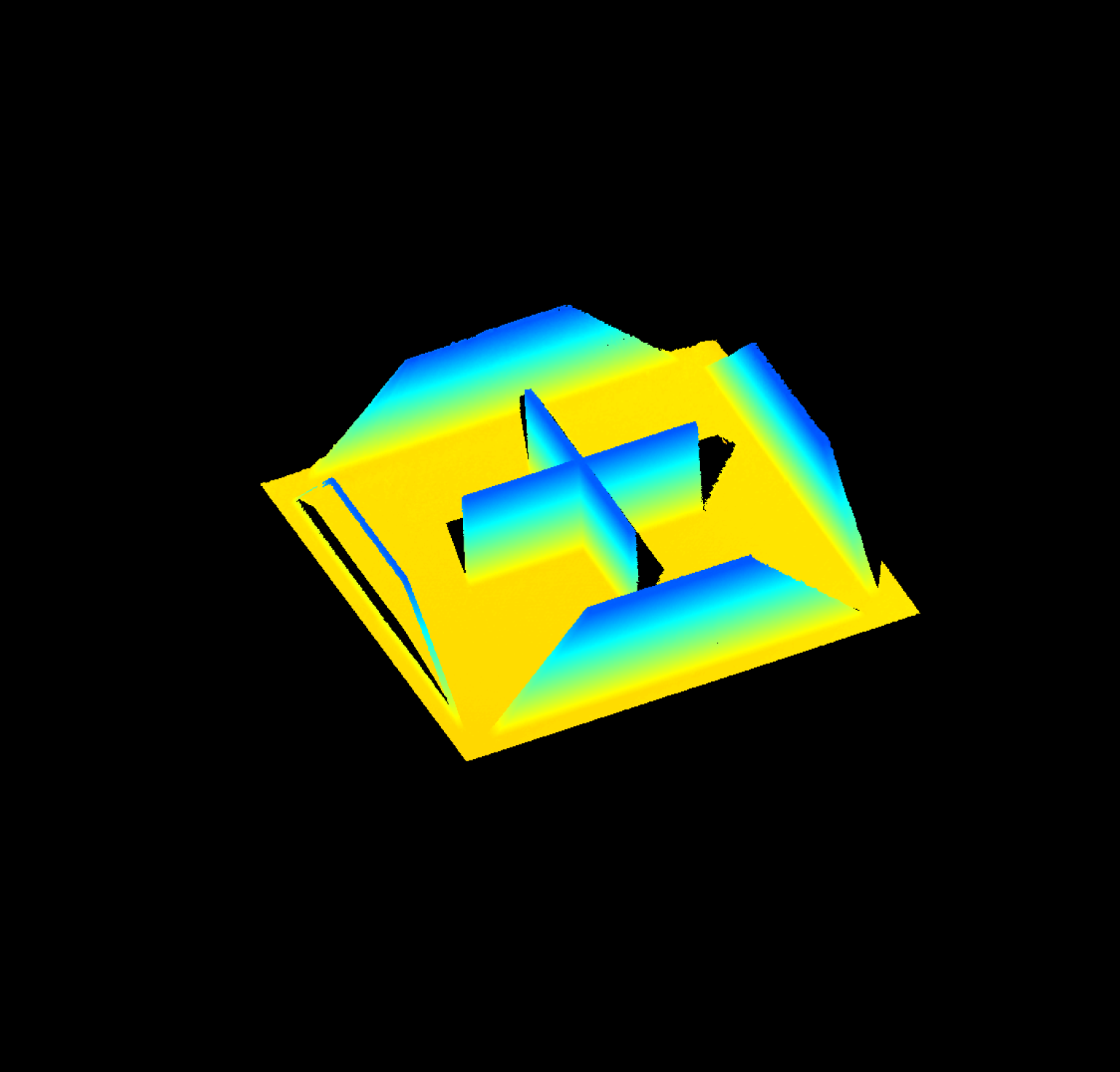
よくある問題 対象物 2.3.2 2.3.3 多重反射によるデータの損失と間違い

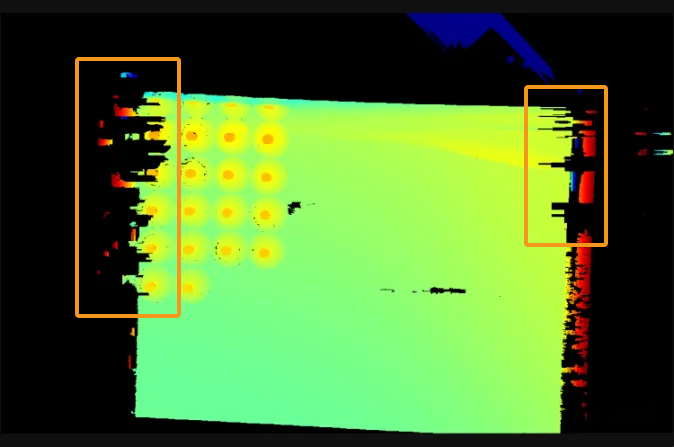
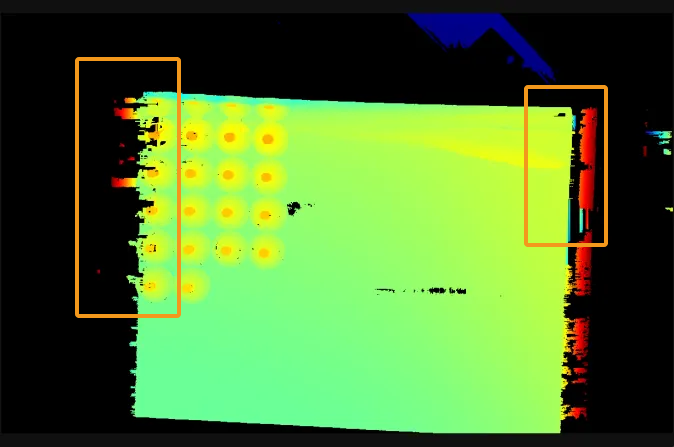

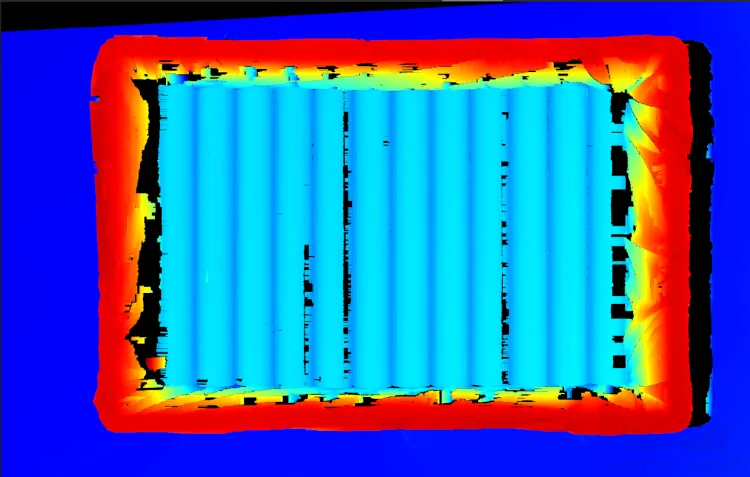
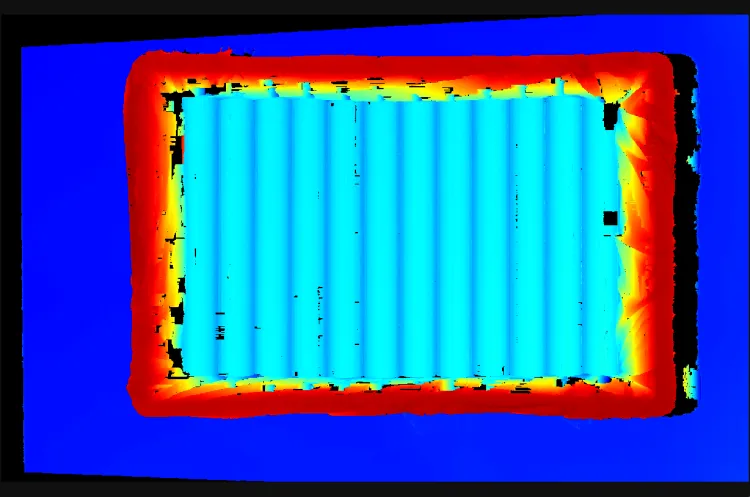
ぶら下がっている物のデータの間違い


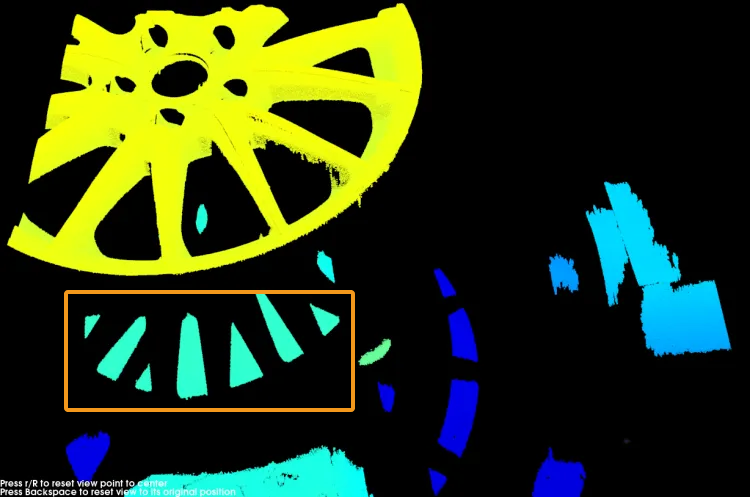
光のにじみによるデータの損失

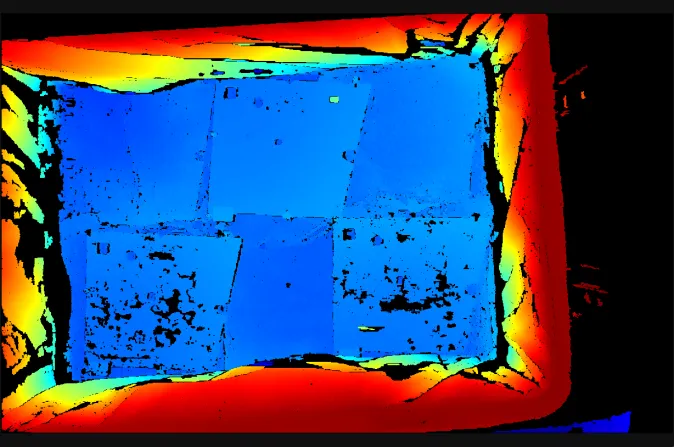
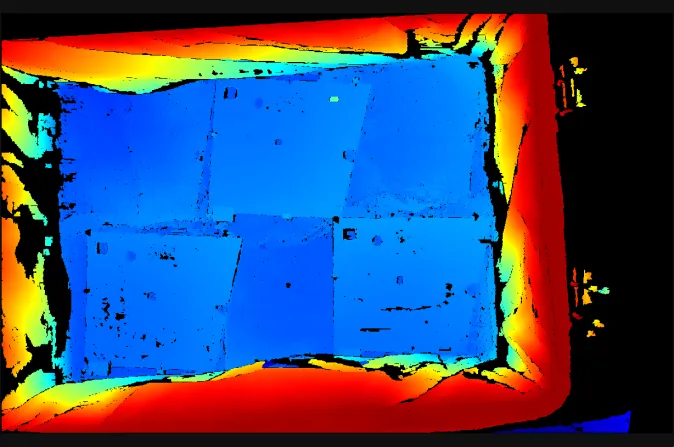
縞コントラストしきい値パラメータに反射が追加されました。
問題修復
Mech-Eye SDK 2.3.3 バージョンでは、以下の問題を修復しました。
-
NANO:露出回数が 1 より大きい場合、コーディングモードを精確から快速に変更した後、最初に取得する深度データにあるピクセル値は全部無効(nan)である問題を修復しました。
-
NANO:同じパラメータ値を使用しても 2D 画像収集時間は Nano より 100~200ms 長くなる問題を修復しました。
-
データ保存ウィンドウではデータの種類をチェックしないと同名ファイルを置き換えるがチェックできない問題を修復しました。
-
2.1.0 以下のバージョンで保存されている仮想デバイスファイルを開けない問題を修復しました。
Mech-Eye API
新しい型番 NANO ULTRA に対応可能
Mech-Eye SDK 2.3.3 は新しいカメラ型番 NANO ULTRA を接続し、それを制御してパラメータを調整してデータを収集することができます。また、NANO ULTRA には反射部品溶接組み込みパラメータグループがあり、反射部品の溶接や一定角度で 2つの部品の溶接に適用できます。
|
|
|
|
|
|
NANO ULTRA の技術仕様は、NANO ULTRAをお読みください。
| Mech-Vision を NANO ULTRA に接続するには、1.8.2 以上のバージョンを使用してください。 |
PRO S と PRO M:コーディングモードを「Reflective」に設定した時に対象物の画像を取得する速度・効果の改善
PRO S と PRO M カメラファームウェアを 2.3.3 バージョンにアップグレードすると、ProjectorFringeCodingMode(コーディングモード)パラメータを反射に設定すると以下の改善が可能です。
-
2.3.2 バージョンより収集時間が短いです。
-
ROI を設定しないと、深度データの収集時間は約 20% 短縮されます。
-
ROI を設定するとさらに短縮できます。ROI を元画像の半分に設定すると、深度データの収集時間は約 32% 短縮できます。元画像の四分の一に設定すると約 40% 短縮できます。
-
-
以下の深度データ品質の改善が可能です。
よくある問題 対象物 2.3.2 2.3.3 多重反射によるデータの損失と間違い
ぶら下がっている物のデータの間違い
光のにじみによるデータの損失
反射 を使用する時に FringeContrastThreshold(縞コントラストしきい値)パラメータを調整できます。
問題修復
Mech-Eye SDK 2.3.3 バージョンでは、以下の問題を修復しました。
-
NANO:露出回数が 1 より大きい場合、コーディングモードを精確から快速に変更した後、最初に取得する深度データにあるピクセル値は全部無効(nan)である問題を修復しました。
-
NANO:同じパラメータ値を使用しても 2D 画像収集時間は Nano より 100~200ms 長くなる問題を修復しました。
-
Python の capture_stereo_2d_images サンプルプログラムの 26 行目の
get_color_image()コマンドがget_gray_scale_image()になった問題を修復しました。
GenICam インターフェース
新しい型番 NANO ULTRA に対応可能
Mech-Eye SDK 2.3.3 は新しいカメラ型番 NANO ULTRA を接続し、それを制御してパラメータを調整してデータを収集することができます。また、NANO ULTRA には反射部品溶接組み込みパラメータグループがあり、反射部品の溶接や一定角度で 2つの部品の溶接に適用できます。
|
|
|
|
|
|
NANO ULTRA の技術仕様は、NANO ULTRAをお読みください。
| Mech-Vision を NANO ULTRA に接続するには、1.8.2 以上のバージョンを使用してください。 |
PRO S と PRO M:コーディングモードを「Reflective」に設定した時に対象物の画像を取得する速度・効果の改善
PRO S と PRO M カメラファームウェアを 2.3.3 バージョンにアップグレードすると、ProjectorFringeCodingMode(コーディングモード)パラメータを反射に設定すると以下の改善が可能です。
-
2.3.2 バージョンより収集時間が短いです。
-
ROI を設定しないと、深度データの収集時間は約 20% 短縮されます。
-
ROI を設定するとさらに短縮できます。ROI を元画像の半分に設定すると、深度データの収集時間は約 32% 短縮できます。元画像の四分の一に設定すると約 40% 短縮できます。
-
-
以下の深度データ品質の改善が可能です。
よくある問題 対象物 2.3.2 2.3.3 多重反射によるデータの損失と間違い
ぶら下がっている物のデータの間違い
光のにじみによるデータの損失
反射 を使用する時に FringeContrastThreshold(縞コントラストしきい値)パラメータを調整できます。