キャリブレーション時に 2D と 3D 露出パラメータを調整
本節では、ハンド・アイ・キャリブレーション及び内部パラメータチェックを実行する時に完全なキャリブレーションボードの 2D 画像と深度画像、点群を取得するために露出パラメータを設定する方法を紹介します。
以下の手順を実行します。
-
お使いのカメラ型番に応じて 2D パラメータを調整します。
型番 関連パラメータ DEEP と LSR S、LSR L、LSR XL
2D 画像(深度ソース)クラスの露出モードを Timed に設定する
ほかの型番
照明が安定している現場では露出モードを Timed に設定する
照明が安定しない現場では露出モードを Auto に設定する
-
データ収集エリアの
 をクリックしてデータを取得します。
をクリックしてデータを取得します。 -
2D 画像/2D 画像(深度ソース)を確認します。輝度が適切で、キャリブレーションボードの表面のディテールがはっきり見られるかを確認します。
暗い画像 適切な明るさ 明るい画像 
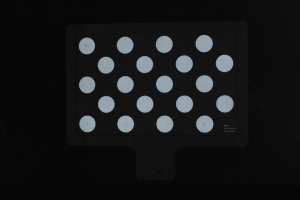
キャリブレーションボードの 2D 画像/2D 画像(深度ソース)の品質を評価する時はピクセルのグレースケール値を参考できます。キャリブレーションボードのドットのグレースケール値が 180~220 の場合、画像の品質が良好と判断します。カラーカメラを使用する場合、第三者のツールで RGB 値をグレースケール値に変換できます。
メニューバーのビューのクリックメニューで画像情報ボックスをチェックすればカーソルの位置のピクセルの RGB 値/グレースケール値を確認できます。
-
画像が明るすぎる場合、または暗い場合は手順 4 に進みます。
-
画像の明るさが適切な場合、手順 5 に進みます。
-
-
下表の内容に従って 2D パラメータを調整して手順 2 と手順 3 を繰り返します。
画像の輝度 露出モード 調整の手順 明るすぎる
Timed
Auto
最小グレースケール値を低くする
暗すぎる
Timed
Auto
最小グレースケール値を高くする
-
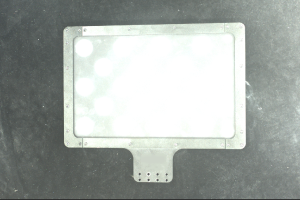
深度画像と点群を確認します。キャリブレーションボードの深度画像と点群が完全かを確認します。以下はキャリブレーションボードの点群を例として示します。
完全な点群 不完全な点群 不完全な点群 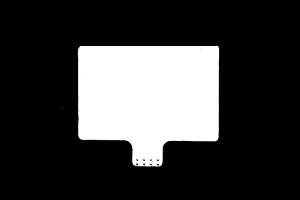
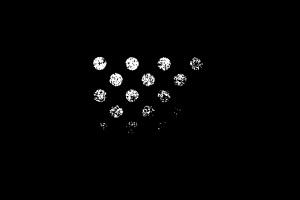
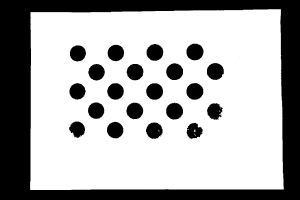
画像の黒い部分は点群抜けです。
-
深度画像と点群が完全な場合、パラメータ設定はこれで終わります。
-
深度画像または点群にデータの損失が発生した場合、3D 露出設定を調整してください。
キャリブレーションボードのデータを収集する時、露出回数を「1」に設定すれば完全な深度データが取得できます。
-