カメラ精度
本節では、カメラの精度の評価指標および精度に影響を与える要因について説明します。
カメラ精度の評価指標
絶対精度と繰り返し精度に分けられます。それぞれ説明していきます。
絶対精度
カメラの絶対精度は、実際の物体をどれだけ正確に測定できるかを示す指標です。この指標は、VDI/VDE 2634 Part 2 規格に定められた測定方法に従い、測定の結果はカメラの技術仕様の VDI/VDE 測定精度として使用できます。
測定方法は次の通りです。
-
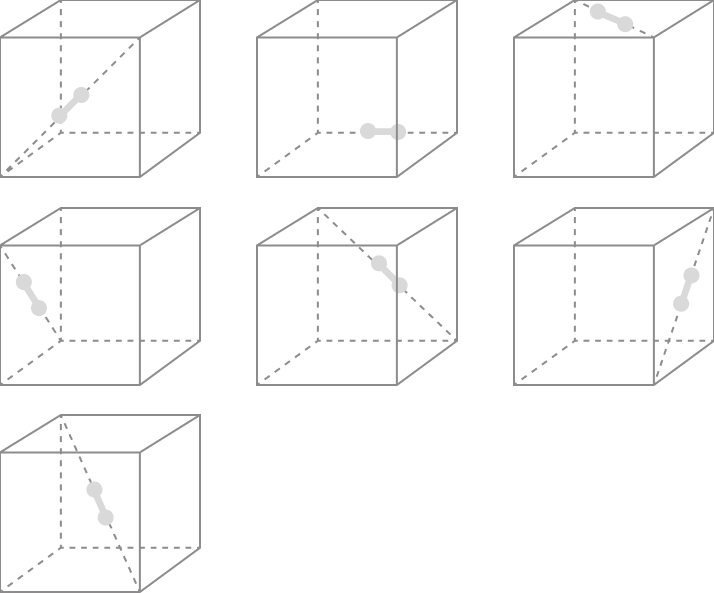
測定対象物にはセラミック材質の測定工具を使用します。この工具は、短い棒と 2つの球体で構成されています。
-
この工具を以下のように、7つの位置に配置してそれぞれの点群データをカメラによって取得します。
-
点群を使用して 2つの球面をフィッティングし、球心座標を計算してから球心間距離を計算します。
-
球心間距離の測定値と真値との差を計算してこの差を球心間距離の真値で割った値を球心間距離の誤差とします。7つの球心間距離の誤差でもっとも高い値を絶対精度とします。
繰り返し精度
カメラの繰り返し精度には、Z 方向一点繰り返し精度と Z 方向エリア繰り返し精度が含まれています。詳細は、カメラ技術仕様をお読みください。
-
Z 方向一点繰り返し精度(1σ):カメラによって取得した一点の深度データ(Z 値)の繰り返し精度を評価します。
測定方法は次の通りです。
-
表面が粗くて拡散反射する白いセラミックプレートを対象物に使用します。
-
異なるワーキングディスタンスで画像データを 100 回収集します。
-
各画素の 100 の深度測定値のバラツキを計算します。バラツキの中央値を当該ワーキングディスタンスにおける Z 方向一点繰返し精度とします。
-
-
Z 方向エリア繰り返し精度(1σ):カメラによって取得したエリアの深度データ(Z 値)の繰り返し精度を評価します。この指標は、UHP-140 にのみあります。
測定方法は次の通りです。
-
表面が粗くて拡散反射する白いセラミックプレートを対象物に使用します。
-
異なるワーキングディスタンスで画像データを 100 回収集します。
-
深度画像で 200 × 200 ピクセルのエリアを 2 か所ずつ指定します。指定した 2つのエリアの深度画像の平均値を計算してその差を計算します。
-
このように取得した 100 の差のバラツキを計算して当該ワーキングディスタンスにおける Z 方向エリア繰り返し精度とします。
-
カメラ精度に影響を与える要因
以下の要因があげられます。
-
カメラハードウェア:カメラ本体またはその部品(投光部やセンサなど)の故障や損傷。例えば、現場のデバイスなどと衝突したり、故障が生じたらカメラ精度に影響が出てしまいます。
-
環境の要因:照明や温度、湿度、振動などはカメラの機能に影響を与えます。特に温度は温度ドリフトを引き起こしやすい要因です。
-
取付装置:カメラの取付装置の変形、緩みなどによりカメラの揺れが起こって精度に影響します。
また、撮影距離が遠いほど繰り返し精度は低下します。カメラ技術仕様の Z 方向一点繰り返し精度曲線を参考にしてください。
温度ドリフト
温度ドリフトとは、カメラの温度が変化し、それが出力する座標データも変化してしまうことです。カメラの光学部品(投光部やレンズなど)は温度の変化とともに構造的な変化や位置の変化が生じ、三角測量に基づいた座標データが変化します。
カメラ内部の温度と環境温度はいずれも温度ドリフトの要因になります。
-
カメラ内部:カメラの電源を入れた後、内部部品は発熱します。
環境温度が変化しない限り、冷却機能によりカメラの内部温度が安定するようになります。
-
環境:外部環境の温度が変化する時、カメラの温度も変化します。
カメラ内部温度が安定した後、環境の温度が変化するとカメラの温度も変わります。
温度ドリフトは、カメラの絶対精度と繰り返し精度に影響し、要件を満たす座標データを出力できない恐れがあります。以下の方法で対応してください。
-
ウォームアップ:ハンド・アイ・キャリブレーションや内部パラメータのチェック・校正、撮影を実行する前に、ウォームアップツールを使用してカメラをウォームアップしておきます。
-
環境の温度を制御する:環境の温度を安定に保ちます。
-
ビジョンシステムドリフトの自動補正ソリューションを実行する:カメラを 3D ビジョンガイドの応用に使用する場合に、このソリューションにより温度ドリフトを含む 3D ビジョンシステムの安定性を改善できます。