Robot Communication Configuration
You have completed the hardware integration of the vision system with the robot system in the Vision System Hardware Setup section. In this section, you will complete the communication integration between the two, ensuring that the vision system and the robot side can exchange data accurately in real time.
To configure the robot communication, you usually need to load the communication program and configuration files provided by Mech-Mind into the robot system and complete the corresponding communication configurations.
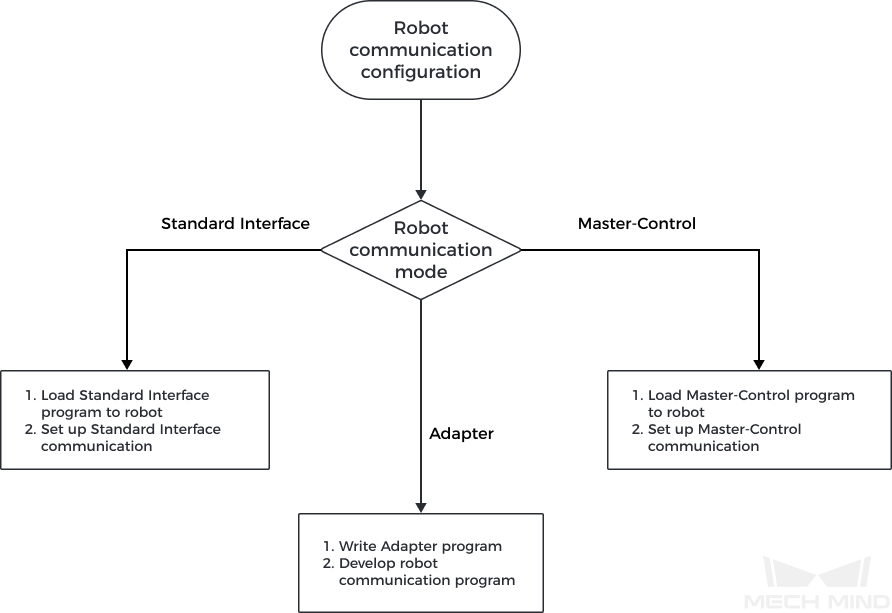
Depending on the different robot communication modes selected in the vision solution design phase, the configuration you need to complete in this phase also varies.
-
If you have selected the Standard Interface communication mode in the vision solution design phase, you need to load the Standard Interface program and configuration files of the robot into the robot system in this phase. You also need to complete the corresponding communication configurations in this mode.
You can search for the User Manual about the Standard Interface communication according to your robot or PLC brand in the Standard Interface Adaptation section.
-
If you have selected the Master-Control communication mode in the vision solution design phase, you need to load the Master-Control program and configuration files of the robot into the robot system in this phase. You also need to complete the corresponding communication configurations in this mode.
You can search for the User Manual about the Master-Control communication according to your robot brand in the Master-Control Adaptation section.
-
If you have selected the Adapter communication mode in the vision solution design phase, you need to write an Adapter program for the vision system and a corresponding robot communication program for the robot side in this phase.
Adapter communication is a customized communication mode, and thus it requires the user to have strong programming skills. For details about Adapter communication, refer to Adapter Communication.