Validate the Pose Repeatability
After building the vision project, you can check the stability of the project by validating the pose repeatability.
Validation Method
Validate the recognition repeatability of the project using the "Check Pose Repeatability by Statistics" Step in the Mech-Vision software.
The validation process is shown below:
-
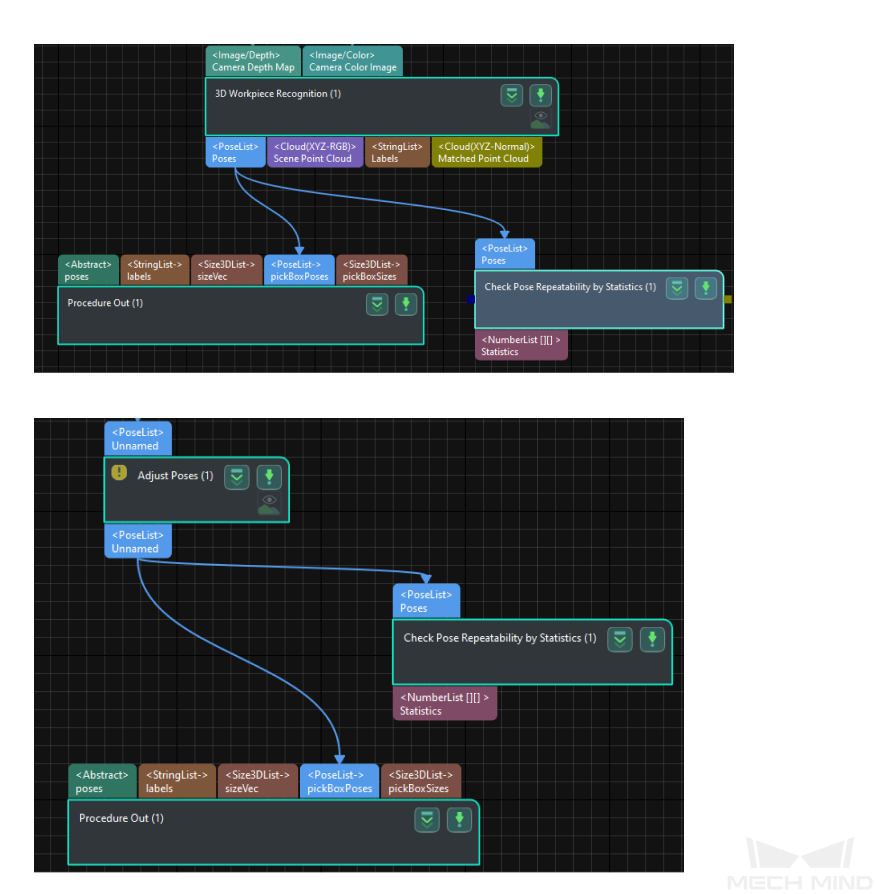
Added the Step of "Check Pose Repeatability by Statistics" to the project.
This step can be connected after a Step that outputs the pose of the target object, as shown in the following figure.
-
Place a single workpiece within the camera’s field of view, then run the project 10 to 20 times to capture and record the poses outputted by the project for that workpiece. This helps determine the repeatability of the poses.
-
Open the statistics data file to view the pose repeatability values.
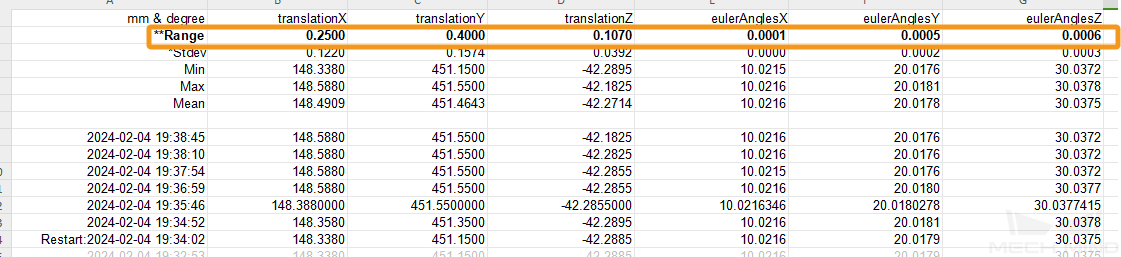
As shown above, the “range” column in the table shows the pose repeatability of the target object at that fixed position:
-
The error range of the x-axis coordinates is approximately ±0.25 mm.
-
The error range of the y-axis coordinates is approximately ±0.40 mm.
-
The error range of the z-axis coordinates is approximately ±0.11 mm.
-
-
If the picking area is relatively large, or if the picking is instable in certain areas, please collect pose repeatability statistics for the same workpiece at multiple locations.
For deep bin-picking scenarios, collect pose repeatability statistics at different locations at different heights. For example, you can divide the plane of the bin into nine-grid areas and then collect pose repeatability statistics at different heights. 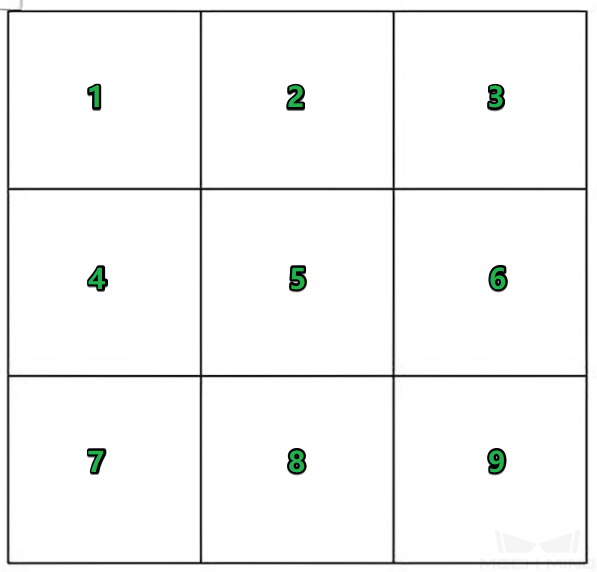
Validation Criteria
Usually, an error range within ±0.5 mm for the x/y/z-axis coordinates is sufficient to meet the accuracy requirements of the project.
However, for scenarios with high accuracy requirements, the error range for x/y/z-axis coordinates should be even smaller, such as ±0.1 mm. If the error range obtained from the statistics is large, please improve the recognition accuracy of the project.