Set Up Communication between External Device and Mech-MSR via TCP ASCII
TCP ASCII Communication Workflow
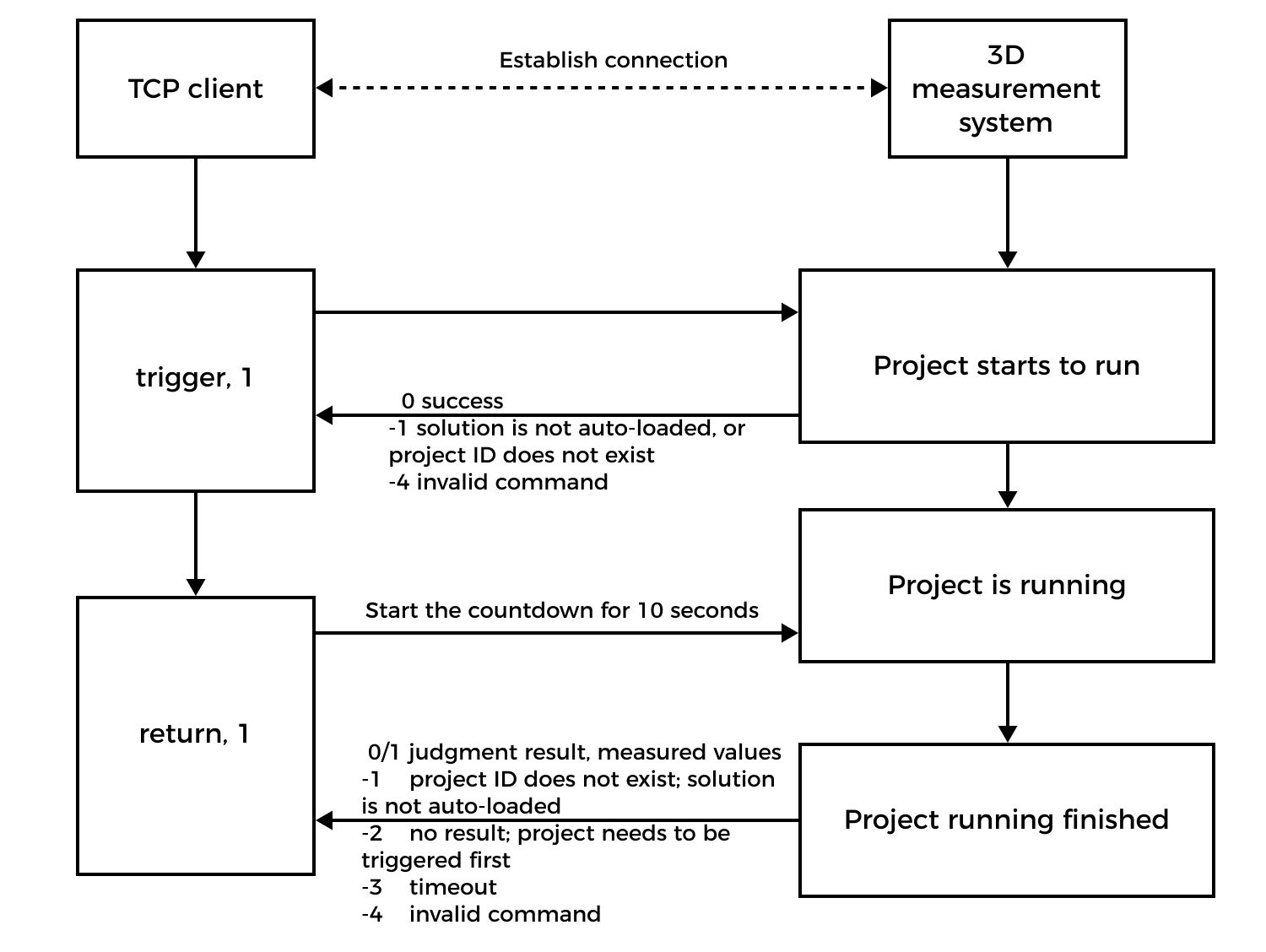
The workflow of TCP ASCII communication is shown in the figure below.
|
The workflow of TCP ASCII communication is explained in detail as follows:
-
A TCP client (an external device such as a PLC) establishes a TCP connection with the 3D measurement system (Mech-MSR).
-
The TCP client sends a
triggercommand to trigger the project to run. -
Mech-MSR returns the status code for the command. For example, if the project is triggered successfully, Mech-MSR returns
0. -
The TCP client sends a
returncommand to obtain the measurement results. After Mech-MSR receives the command, it starts the countdown for 10 seconds. -
Mech-MSR returns results. For example, if the project is run successfully, Mech-MSR returns the measurement results. If the project has not finished running within 10 seconds, Mech-MSR returns the error code
-3.
The next section on TCP ASCII commands will show the commands supported and analyze the returned results.