重新制作点云模板与抓取点
什么是点云模板和抓取点
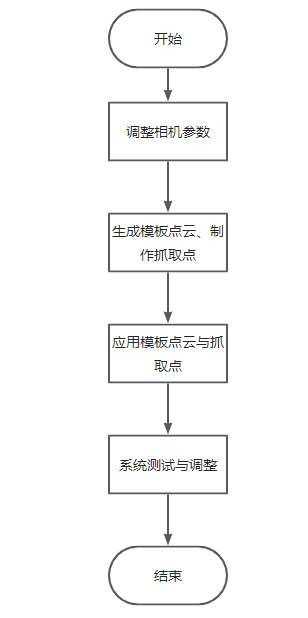
如何创建点云模板与抓取点?
基本要求
好的点云模板至少满足以下 3 点要求:
-
点云模板中的点云分布均匀,数量合理,以避免影响匹配速度。
-
点云模板应包括工件的典型特征,以便在匹配过程中能够准确识别出工件。
-
点云模板应避免存在无关点云等干扰因素,以保证匹配的稳定性和准确性。
为了使点云模板能够满足以上几点要求,需通过调整相机参数来提升采集点云的质量,并对采集后的点云进行杂点移除和点云降采样,进一步提升点云质量。为了方便用户针对目标物体制作点云模板、编辑点云模板,以及添加抓取点,Mech-Vision提供了“工件库”,你可以在此工具中创建点云模板并设置抓取点。
何时需要重新制作点云模板?
当遇到以下情况时需要重新制作点云模板:
-
物体特征变化: 当工件的形状、大小或表面纹理发生变化时,重新制作点云模板以适应新的特征。
-
环境变化: 光照、背景条件的改变可能会影响点云数据的质量,因此在环境变化时重新制作点云模板以确保准确性。
-
精度要求提高: 当对精度有更高的要求时,需要重新制作更精确的点云模板以满足新的精度标准。
-
系统升级或硬件更换: 在进行软件升级、更换相机或其他硬件时,重新制作点云模板以适应新的系统配置。
-
错误率增加: 如果匹配错误率上升,表明现有模板可能已不适用,需要重新制作点云模板以提高匹配的准确性。
-
新应用或产品线引入: 面对新的产品或应用场景时,重新制作点云模板以优化适应新的应用或产品线的需求。
-
方案升级:1.8及之前版本的方案升级到当前版本后,需使用“工件库”重新制作点云模板。