方案设计
本节介绍定子方案的设计思路,包括视觉系统运行流程、软件组合、相机选型、标定板选型、工控机和机器人选型、以及工位和夹具设计等内容。

相机选型及确定安装高度
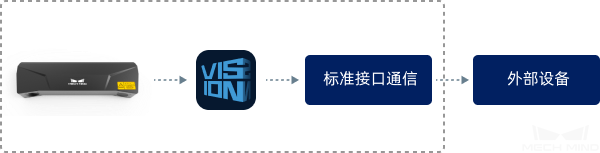
在定子上料项目中,根据相机视野、精度和工作距离,推荐选用Mech-Eye LSR L工业级3D相机(下文简称LSR L相机),该相机精度高,速度快,抗环境光性能优异。关于该相机的详细技术参数请参考LSR L技术参数。如需使用其他型号的相机,请使用3D相机选型工具筛选合适的型号。
确定好相机型号后,请使用3D相机选型工具确定相机的安装高度。具体流程如下:
-
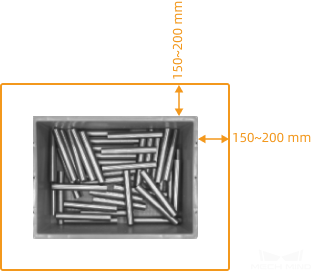
确定物料顶层的尺寸信息和可能出现的极限高度,将其数值分别填入物体大小分类下的长度(mm)、宽度(mm)和高度(mm)选项卡中。
为兼容来料位置的偏差,物料顶层四周的每个边都应预留出150~200mm的余量,如下图所示。即填入的长度和高度值应为物料顶层尺寸 + 下图预留的余量值。
-
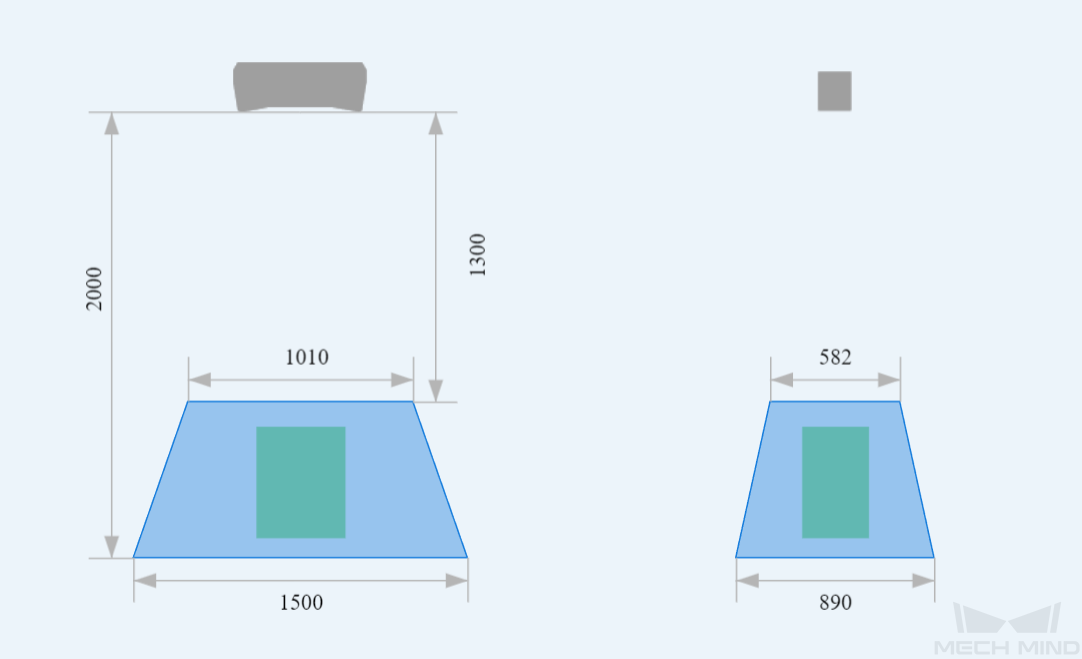
开启相机到物体表面的距离(mm)右侧的开关,不断调节该参数的值,直至右侧代表物料的方块位于相机视野中心,且全部被覆盖,即方块为绿色。
-
相机的安装高度 = 相机到物体表面的距离 + 物料高度。
为保证相机采集的数据质量良好,在满足视野和机器人运动空间等要求的前提下,应使相机到物料顶层的距离在推荐工作距离的范围内。
工控机选型
推荐使用的工控机为Mech-Mind IPC STD,该型号工控机适用于常规拆垛、上下料场景。
机器人选型
在定子方案中,根据抓取范围和精度要求,应选择抓取范围较大、高精度的六轴机器人,如ABB_IRB_6700_150_3_20,本方案中以此机器人为例。
若选择其他品牌机器人,请参考机器人选型。
工位布局设计
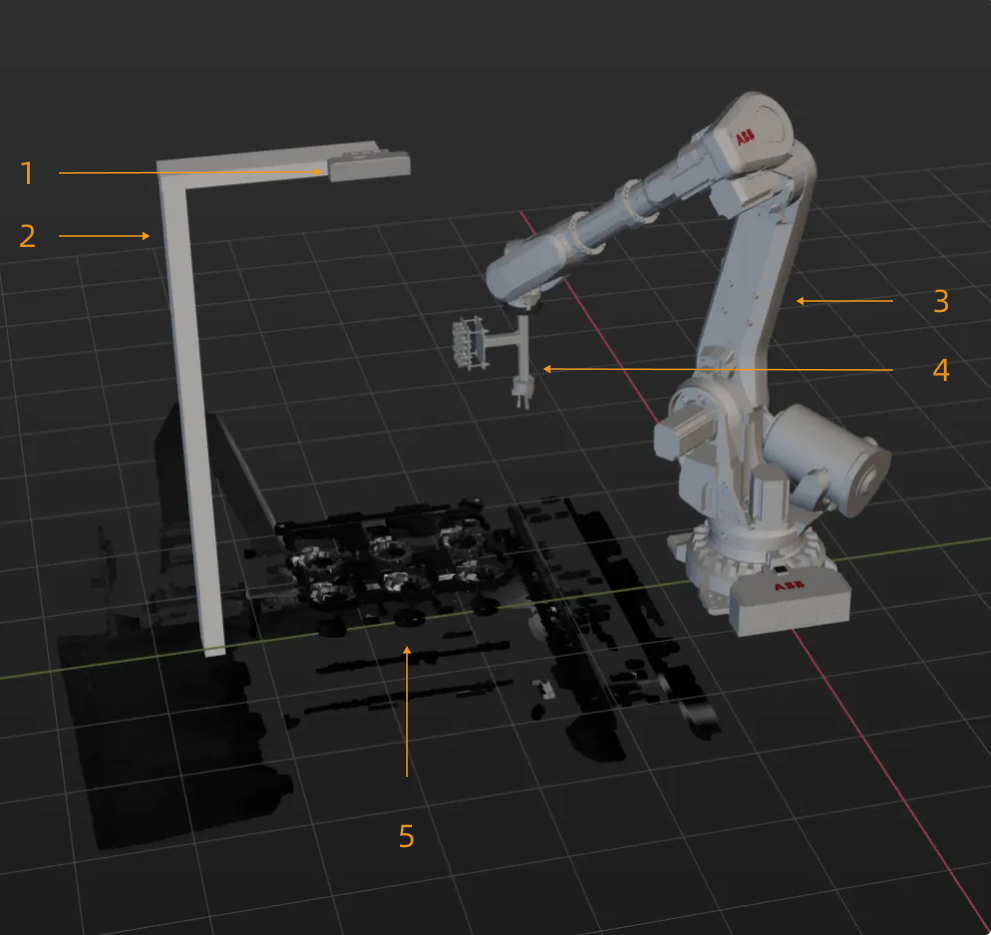
现场工位布局如下图所示,LSR L相机安装在距离托盘正上方2米处,相机采图后可以获取所有工件的点云数据。图中各部分为:1-LSR L相机;2-相机支架;3-机器人;4-夹具;5-来料托盘。
夹具设计
本方案使用内撑式三指夹具夹取定子,该夹具适用于工件表面有允许夹爪插入的凹槽或通孔的场景,其设计如下图所示:1-安装法兰;2-三指气缸;3-内撑夹指;4-夹指指套;5-隔板抓取部分。
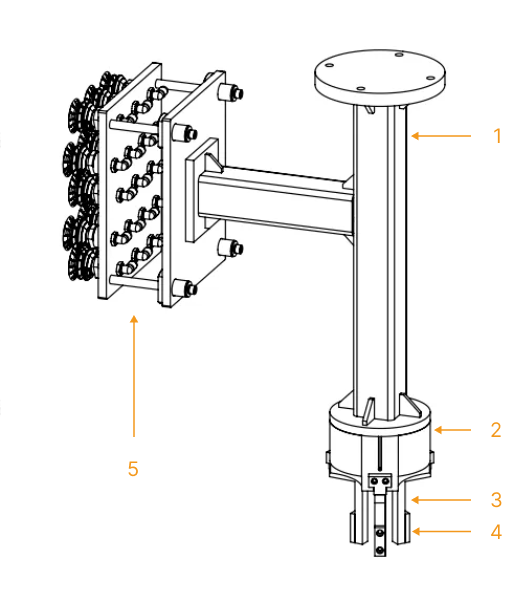
| 本方案中托盘上有多层工件,中间使用隔板隔开,因此夹具中须配置用于抓取隔板的部分。机器人抓取时先抓取最上层工件,最上层工件抓取完成后,需先抓取隔板,再抓取下面一层工件。如现场没有使用隔板,设计夹具时可忽略这部分。 |